Image:
Figure Robotics
A general-purpose humanoid robot designed to autonomously perform a wide range of tasks in manufacturing and logistics.


Figure AI (w/ OpenAI)

Height
168
cm

Weight
60
kg

Speed
1.2
m/s

Payload
20
kg

Actuators
Custom Electric

DoF (Domains of freedom)
41
°

The first robot to successfully perform autonomous warehouse tasks at a BMW plant.
Designed with 41 degrees of freedom to match human speed and range of motion.
Integrated with OpenAI for real-time visual reasoning and natural conversation.
Built from the ground up for high-volume production in commercial environments.
A general-purpose humanoid robot designed to autonomously perform a wide range of tasks in manufacturing and logistics.
As the first generation of Figure's humanoid line, Figure 01 integrated OpenAI’s vision-language models to achieve real-time speech-to-speech interaction. Standing 167 cm tall, it demonstrated the ability to learn tasks through observation, such as operating a coffee machine. Its electric actuation system provided the foundation for precise, low-noise movement in human-centric environments.
Image:
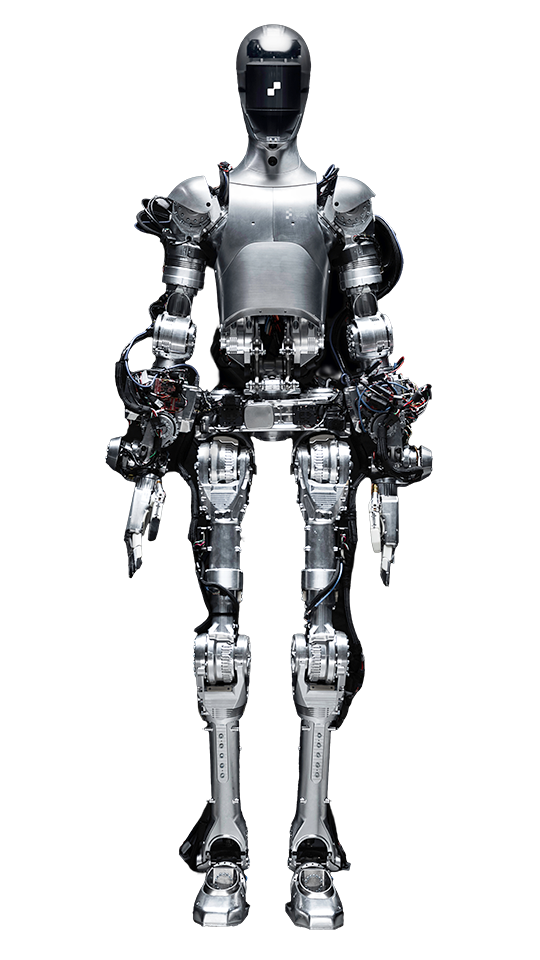
Figure Robotics
The first humanoid to master real-world industrial tasks at scale, powered by OpenAI for natural conversation and visual reasoning.
Figure 01 by Figure Robotics
Actuators
Custom Electric
DoF (Domains of freedom)
41
°
Height
168
cm
Speed
1.2
m/s
Weight
60
kg
Payload
20
kg
Runtime
5
h
OS / AI System
Figure AI (w/ OpenAI)
The pioneer platform for Figure’s partnership with OpenAI, featuring real-time speech-to-speech interaction and the ability to learn complex tasks through visual observation.
Utilizes an electric drive system with a 20kg payload capacity, designed with a human-centric form factor to test dexterity and mobility in unstructured commercial environments.
Equipped with a head-mounted vision system and torque-feedback sensors in the joints to facilitate safe interaction during early-stage pilot deployments in logistics and retail.
Image:
Figure Robotics
Nao is aimed at educational institutions and research organizations looking to incorporate robotics into their curriculum.
Uses human-like height, limb proportions, and reach so it can operate in environments designed for people.
Arms and torso are designed to support human-like postures for tool use and object handling.
Employs bipedal walking and balance strategies approximating natural human gait.




by
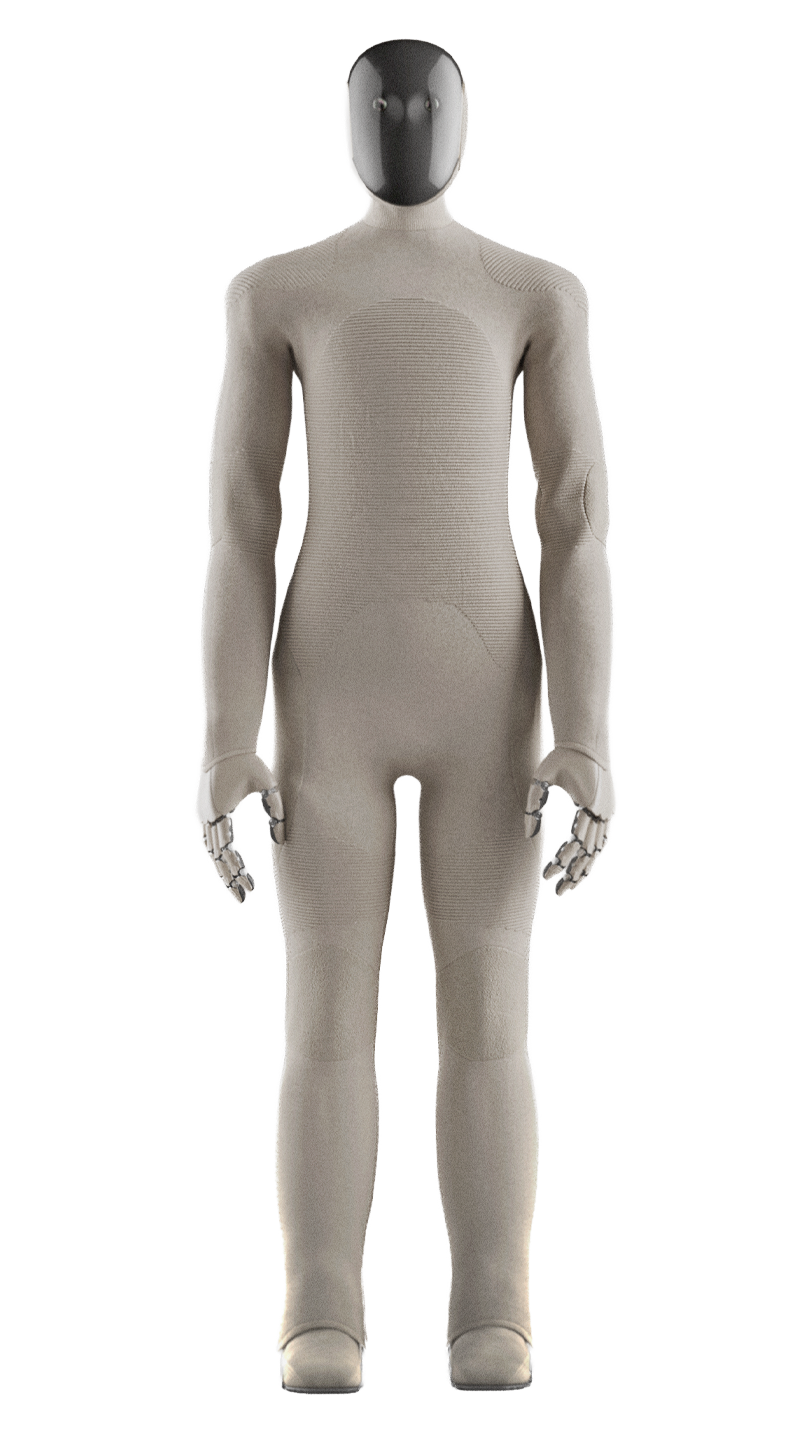
1X Technologies
The next-generation domestic humanoid featuring a muscle-like soft body design and advanced visual manipulation for household tasks.

by
Tesla
Designed for high-risk and repetitive roles, Tesla’s Optimus bot aims to redefine the global workforce through advanced humanoid robotics.

by
Cartwheel
A social humanoid robot designed for companionship and hospitality interaction, with expressive movement capabilities.
by
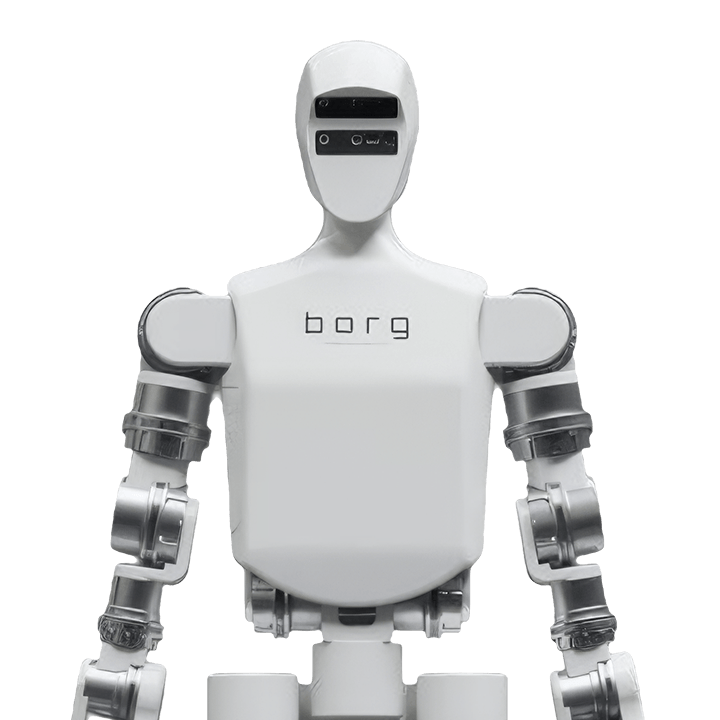
Borg Robotics
A humanoid robot designed for heavy-duty tasks in logistics and manufacturing, focusing on strength and endurance.