Image:
Tokyo Robotics
A torque-controlled humanoid robot designed as a research platform for advanced manipulation and HRI.
ROS based

Height
166
cm

Weight
160
kg

Speed
0.5
m/s

Payload
16
kg

Mobility
Stationary

Actuators
Torque-Sensing Motor

DoF (Domains of freedom)
34
°

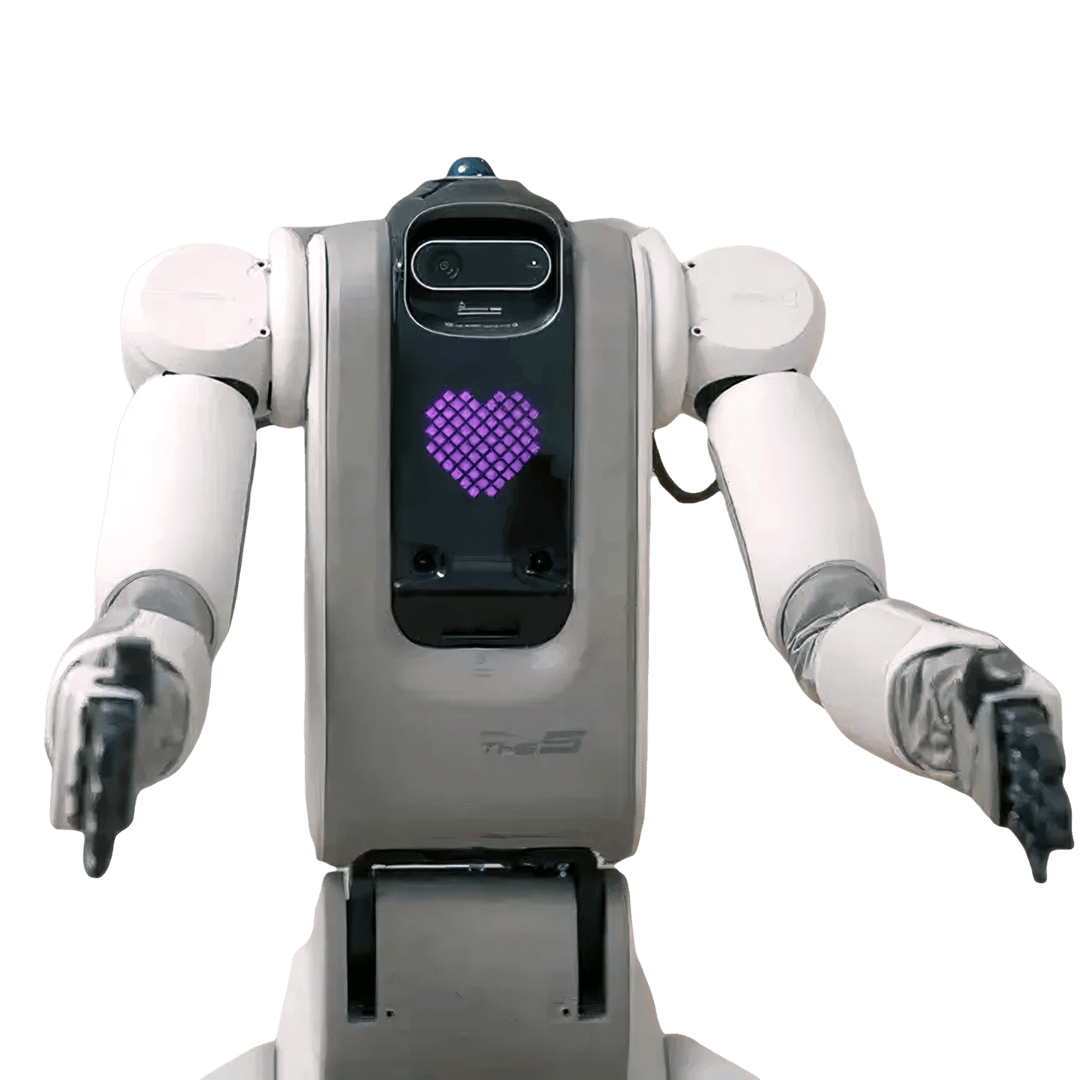
Torobo is equipped with torque sensors in all joints, allowing it to "feel" its surroundings and interact safely with people and objects.
Using the Torobo Puppet interface, you can control the robot's upper body in real-time, making AI training faster and more intuitive.

Its 7-axis dual arms provide a range of motion identical to yours, making it perfect for complex tasks like cooking or assembly.
With full ROS support and a mobile omni-directional base, it's the ideal platform for pushing the boundaries of machine learning.
A torque-controlled humanoid robot designed as a research platform for advanced manipulation and HRI.
Torobo is a force-controllable research platform designed for complex manipulation tasks that require high safety standards. Standing 166 cm tall, it features 7-axis dual arms and a 3-axis waist, all equipped with high-resolution torque sensors. Its ROS-based architecture and transparent control system make it the ideal choice for developers working on the next generation of collaborative AI and household service tasks.
Image:
Tokyo Robotics
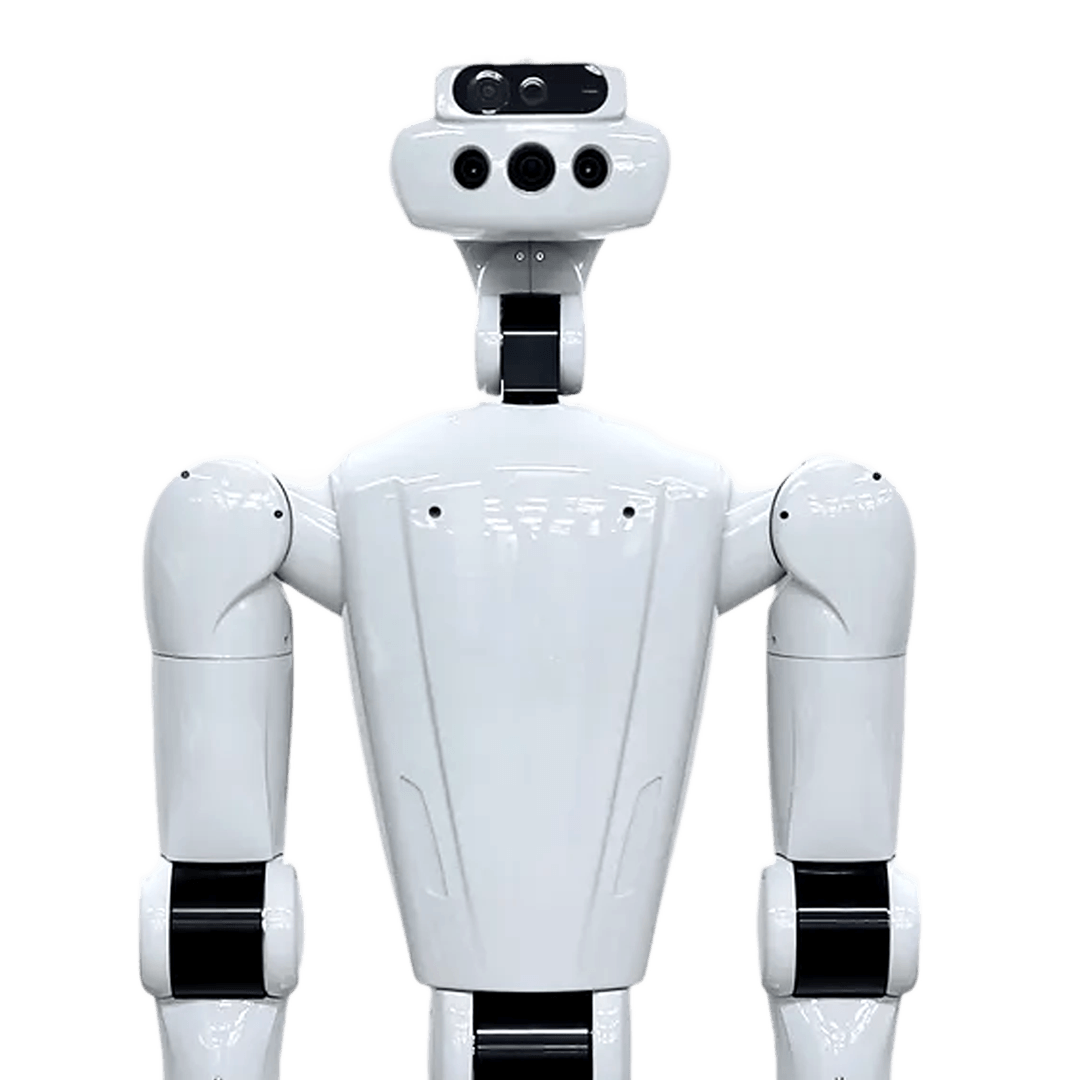
A master of force-controlled interaction, equipped with torque sensors in every joint and a "Puppet" interface that allows for intuitive teleoperation and high-fidelity research in safe human-robot collaboration.
Torobo by Tokyo Robotics
Actuators
Torque-Sensing Motor
DoF (Domains of freedom)
34
°
Height
166
cm
Speed
0.5
m/s
Weight
160
kg
Payload
16
kg
Runtime
3
h
OS / AI System
ROS based
Stationary
ROS based
Features proprietary torque sensors in all joints, enabling high-performance impedance and force control for safe interactions and precise assembly tasks.
Utilizes the Torobo Puppet, a haptic master interface that allows intuitive 1:1 teleoperation and drastically accelerates the generation of training data for AI models.
Fully ROS-compatible with native support for Gazebo simulations, ensuring a seamless transition from algorithmic development to physical execution.
Image:
Tokyo Robotics
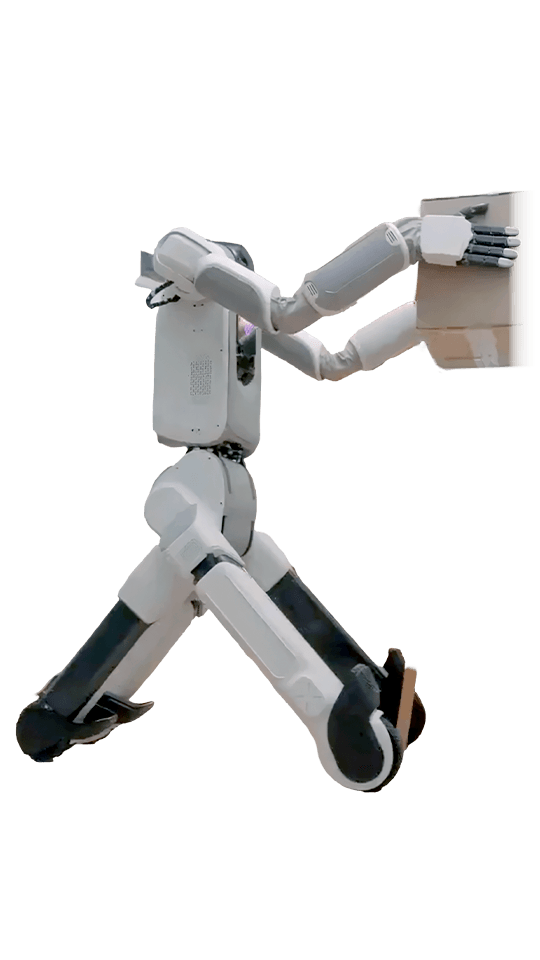
Widely used by RIKEN, Denso, and Waseda University for advanced AI training.
Machine learning research labs, professional kitchens, and pharmaceutical laboratories.
Built to operate in labs designed for humans.
Uses smooth movements that humans can intuitively interpret.
Shoulder, spine, and hip layout mimic human joints.



by
Maxtronics
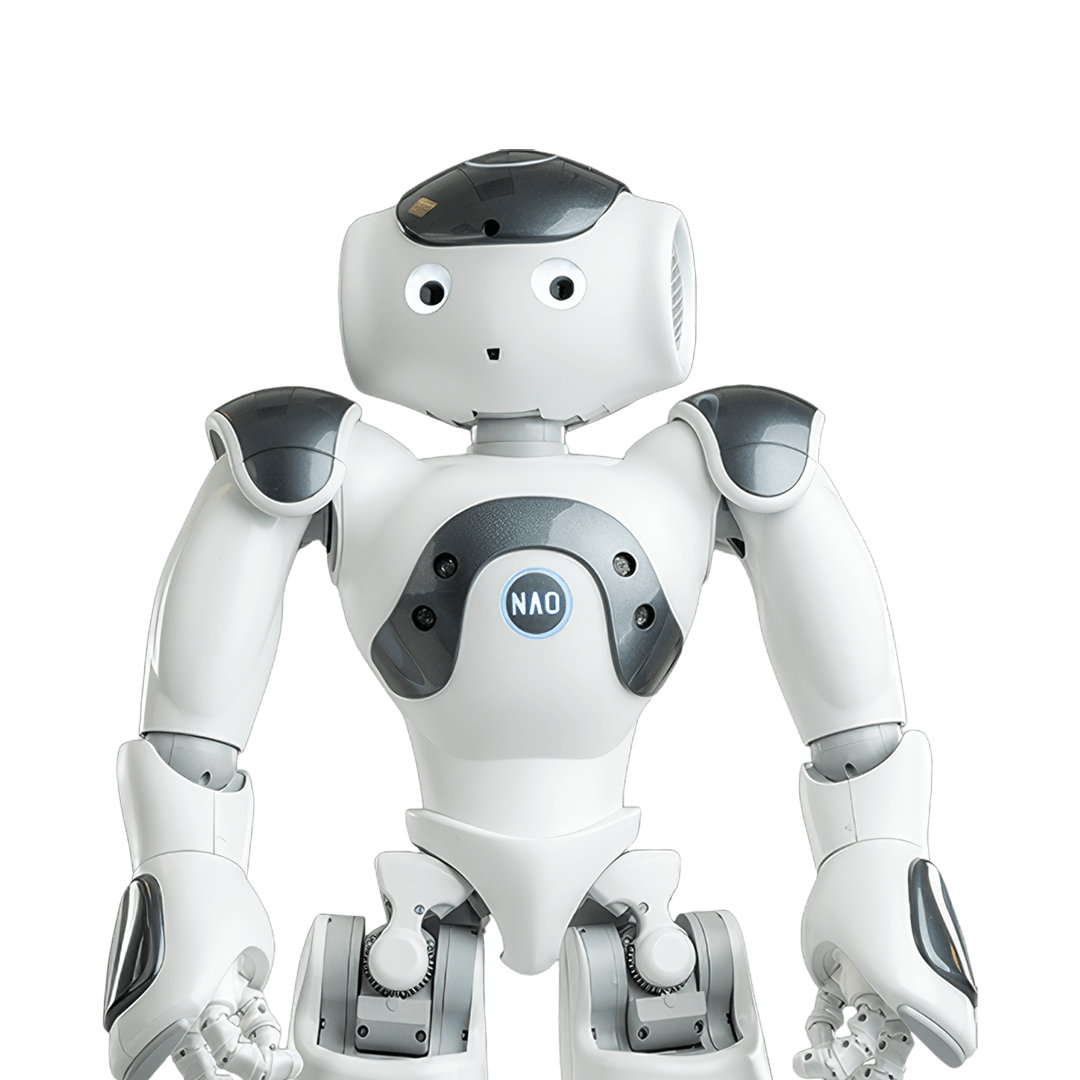
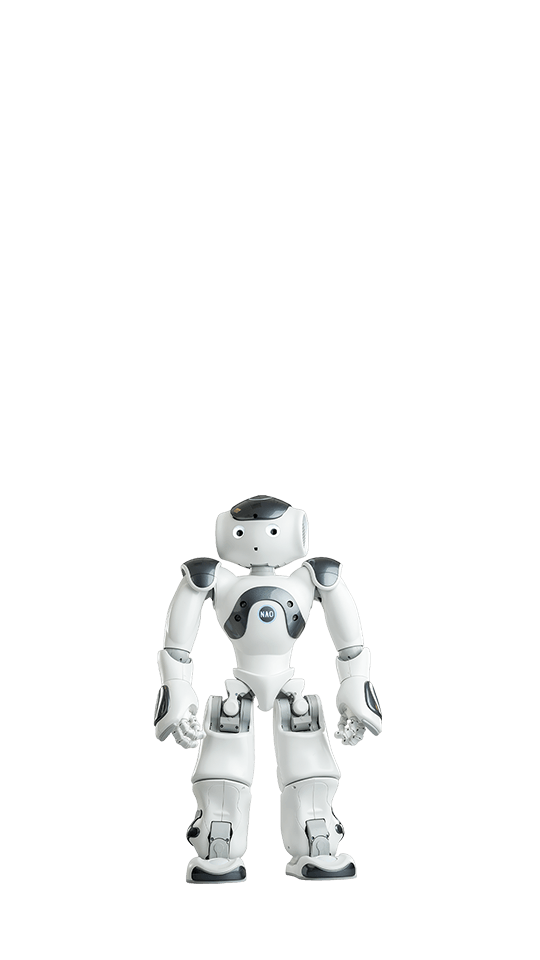
A small, interactive, and programmable humanoid robot widely used in education, research, and healthcare.
by
Tokyo Robotics
A torque-controlled humanoid robot designed as a research platform for advanced manipulation and HRI.
by
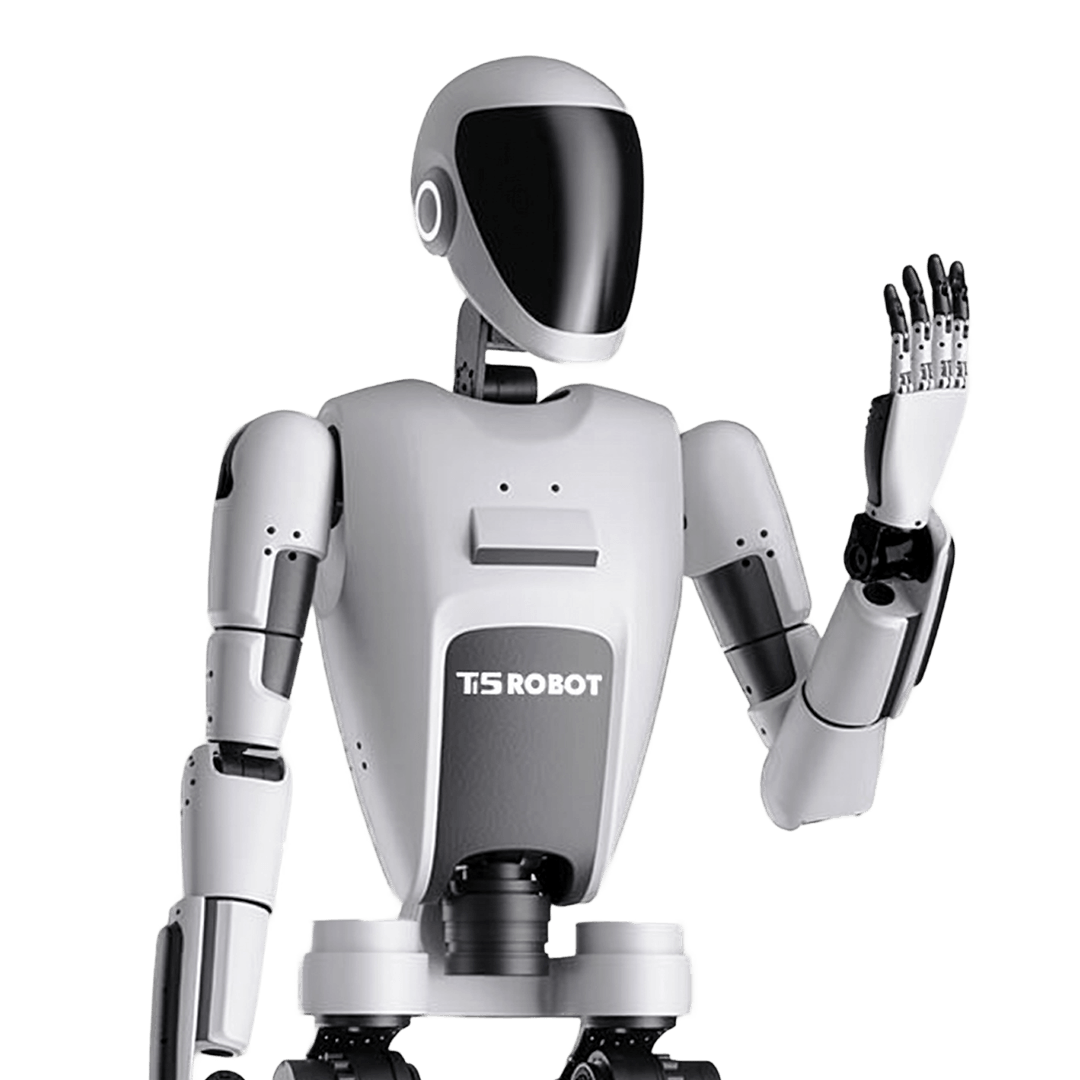
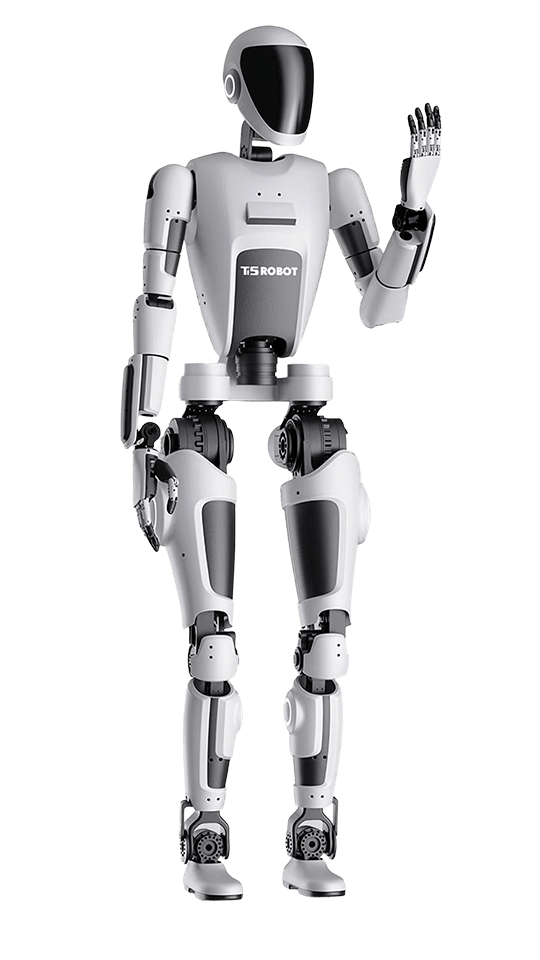
Ti5 Robot
A 1.7m bipedal platform with high torque density joints, capable of dynamic movements like jumping.
by
Tencent Robotics X
Also known as "The Five", a hybrid robot that can switch between walking and wheeled modes for elderly care.