Learn what this feature means, why it is essential, and how it is used across different humanoid robots.
A robot's sense of touch, which enables dexterous manipulation.
This capability fundamentally changes how a robot interacts with the world, enabling sophisticated functions such as "blind picking, slippage detection, and prevention of excessive force application". Sensors that provide a sense of touch, allowing for delicate object handling
Examples
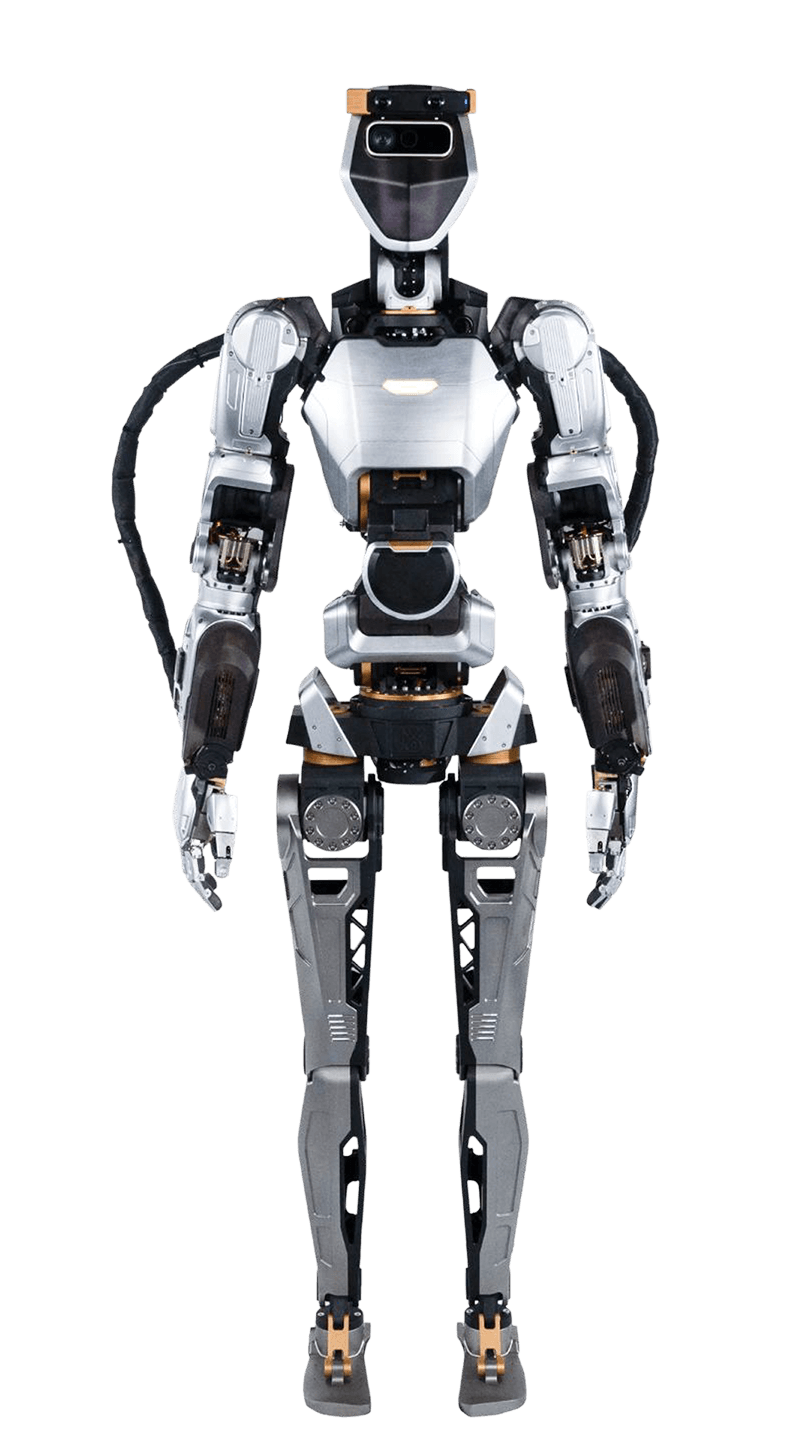
Sanctuary AI's Phoenix robot has integrated new tactile sensors that are sensitive to 5 millinewtons, a sensitivity approaching that of a human.

by
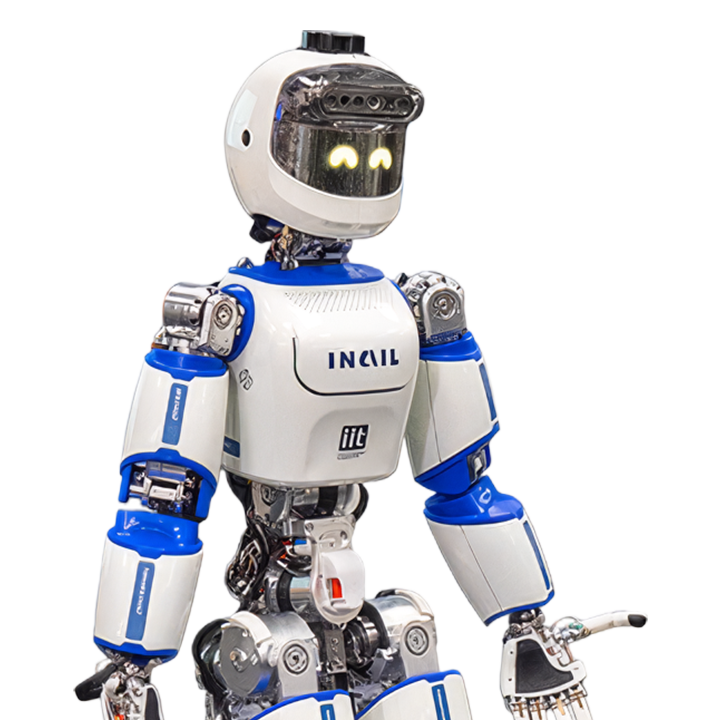
ergoCub Project
A collaborative humanoid robot research project aimed at reducing physical risk and improving ergonomics for workers in industrial settings.

by
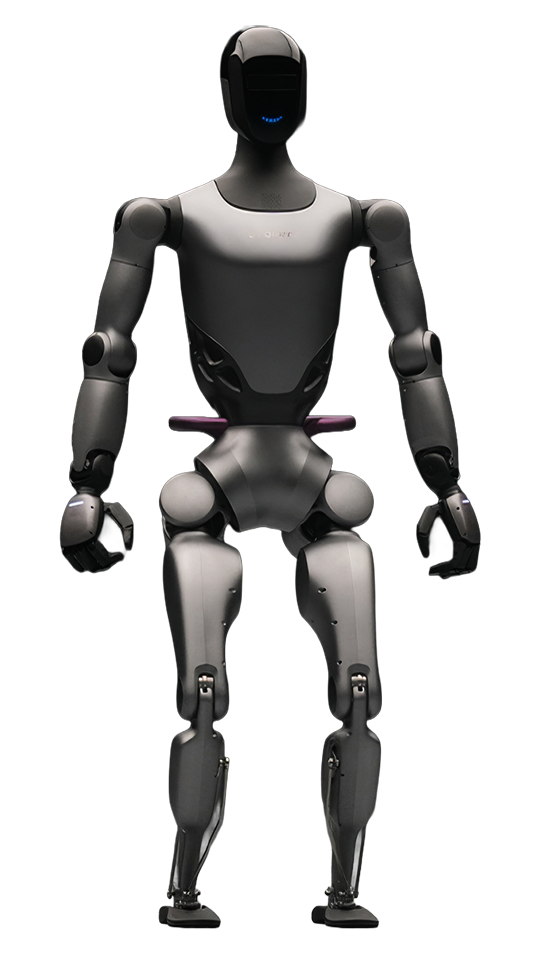
Fourier Intelligence
A high-performance humanoid platform for developers, featuring 12-DoF dexterous hands and high-torque actuators for complex manipulation.
.svg)
by
Nature
The original bipedal model. Extremely high maintenance, notoriously unreliable, and ships with buggy firmware. (f. ~300,000 BCE)

by
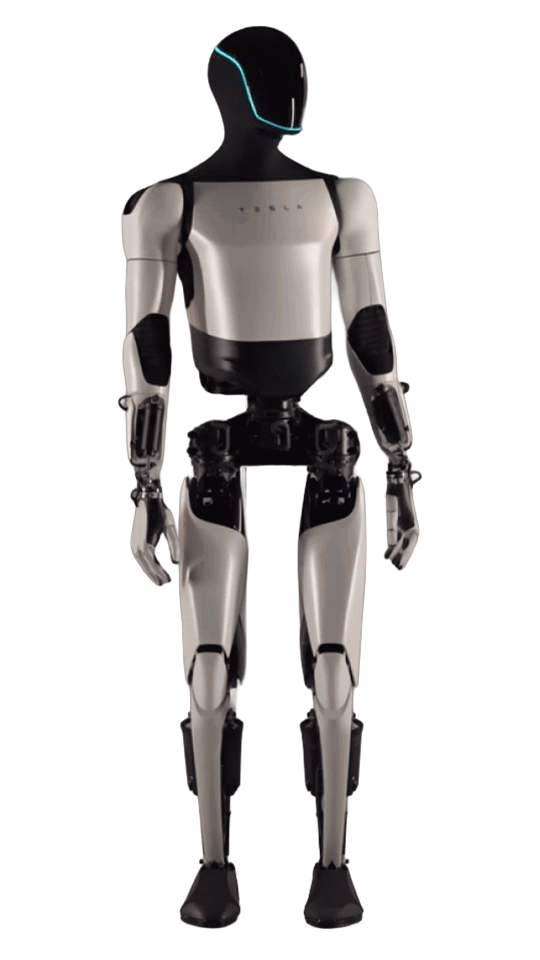
Tesla
A general-purpose, bipedal humanoid capable of performing unsafe, repetitive, or boring tasks using Tesla-designed actuators and sensors.

by
Sanctuary AI
A general-purpose, carbon-fiber humanoid robot designed for autonomous work, powered by the 'Carbon' AI control system.
by
Tokyo Robotics
A torque-controlled humanoid robot designed as a research platform for advanced manipulation and HRI.
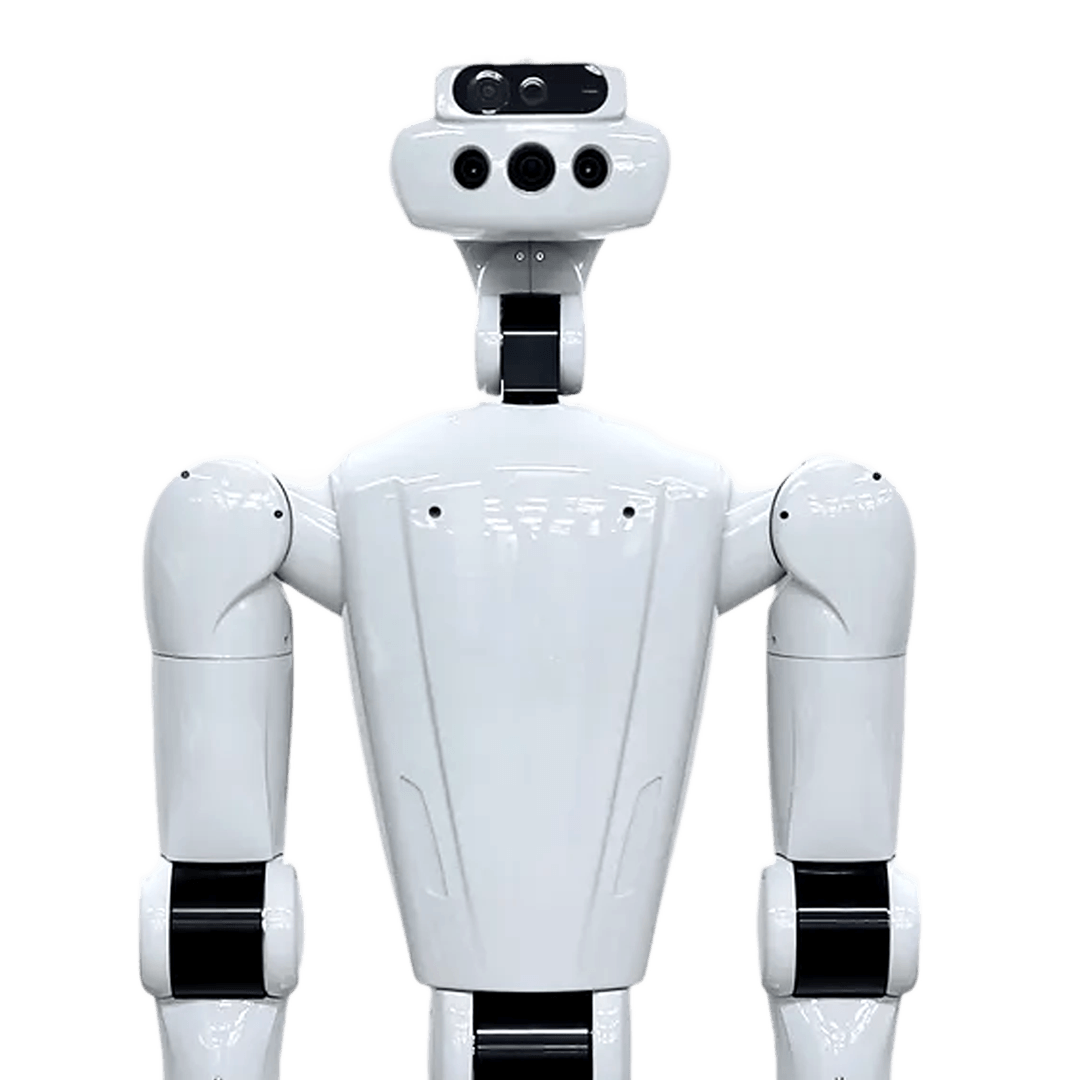
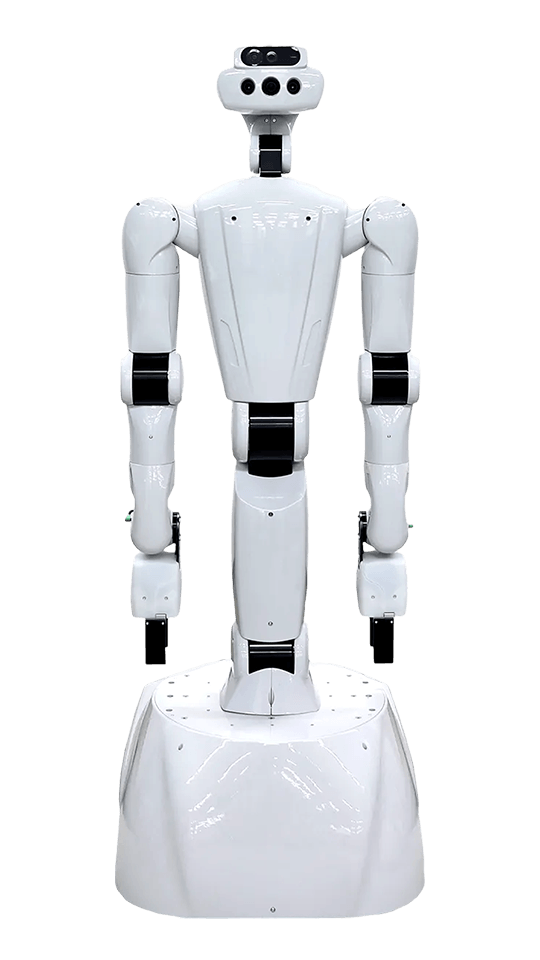
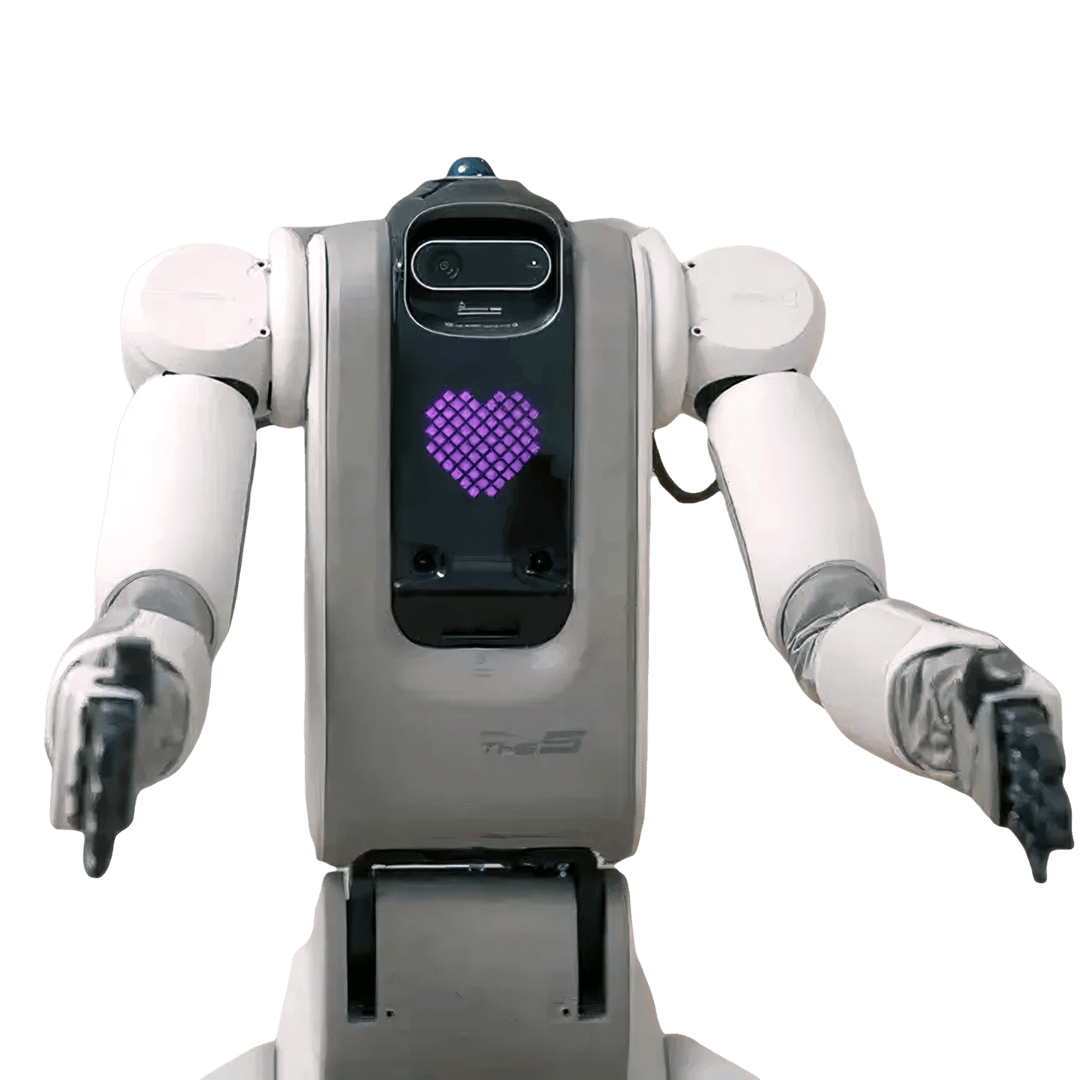
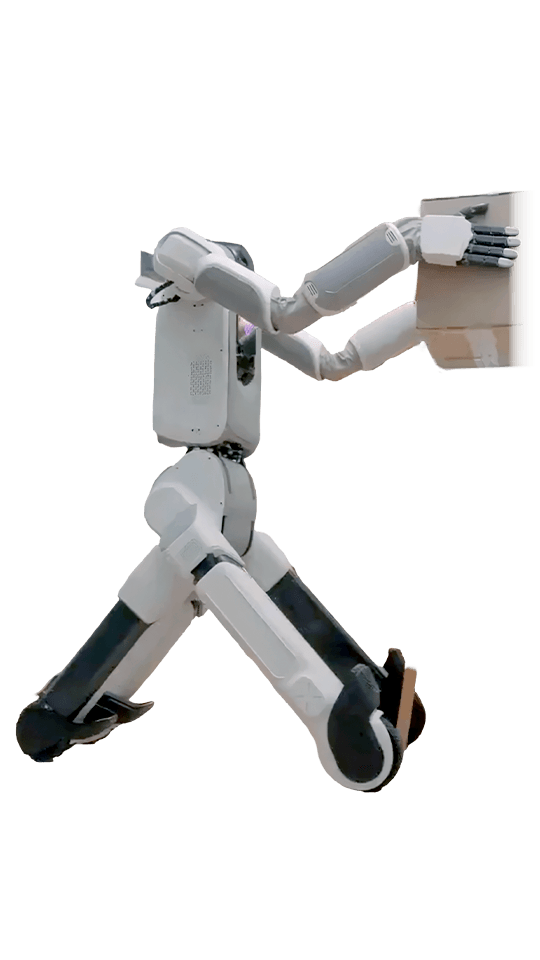
by
Tencent Robotics X
Also known as "The Five", a hybrid robot that can switch between walking and wheeled modes for elderly care.