


Image:
PNDbotics
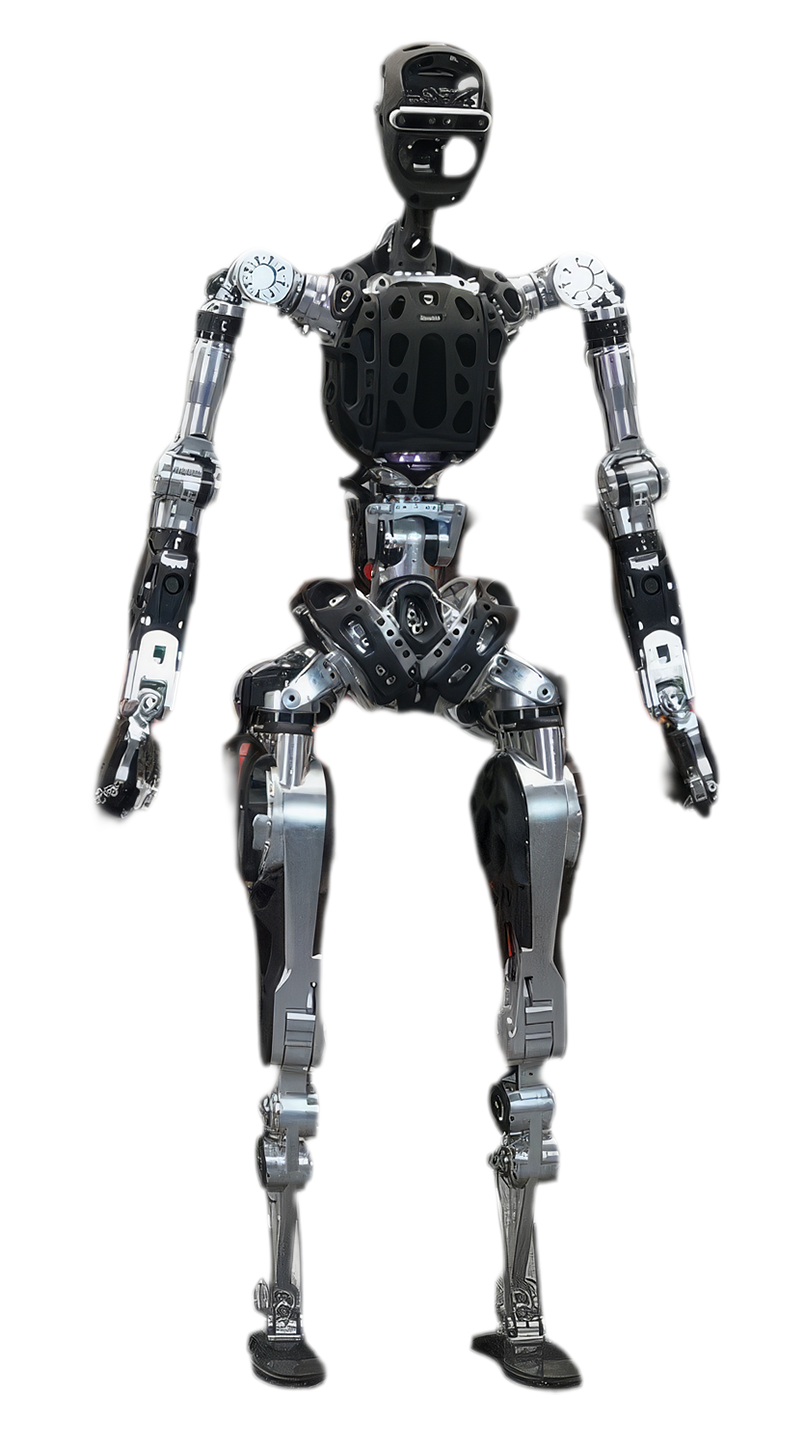
A 167cm tall humanoid research platform with 41 DOF, designed for developers to test motion algorithms.

DRL + imitation learning, WBC+MPC

Height
167
cm

Weight
62
kg

Speed
N/A
m/s

Payload
5
kg

Actuators
Proprietary PSA QDD actuators, up to 360 Nm peak torque

DoF (Domains of freedom)
41
°

Human-like walking dynamics achieved via reinforcement learning.
Functional payload capability for industrial logistics tasks.
Proprietary smart actuators with integrated torque sensing.
Full-stack access for custom AI and DRL development.
A 167cm tall humanoid research platform with 41 DOF, designed for developers to test motion algorithms.
Standing 167 cm and weighing 62 kg, Adam features 41 degrees of freedom. The system is designed for high dynamic stability, capable of maintaining a walking speed of 1.67 m/s while carrying a 5 kg payload using its human-scale bipedal structure.
Image:
PNDbotics
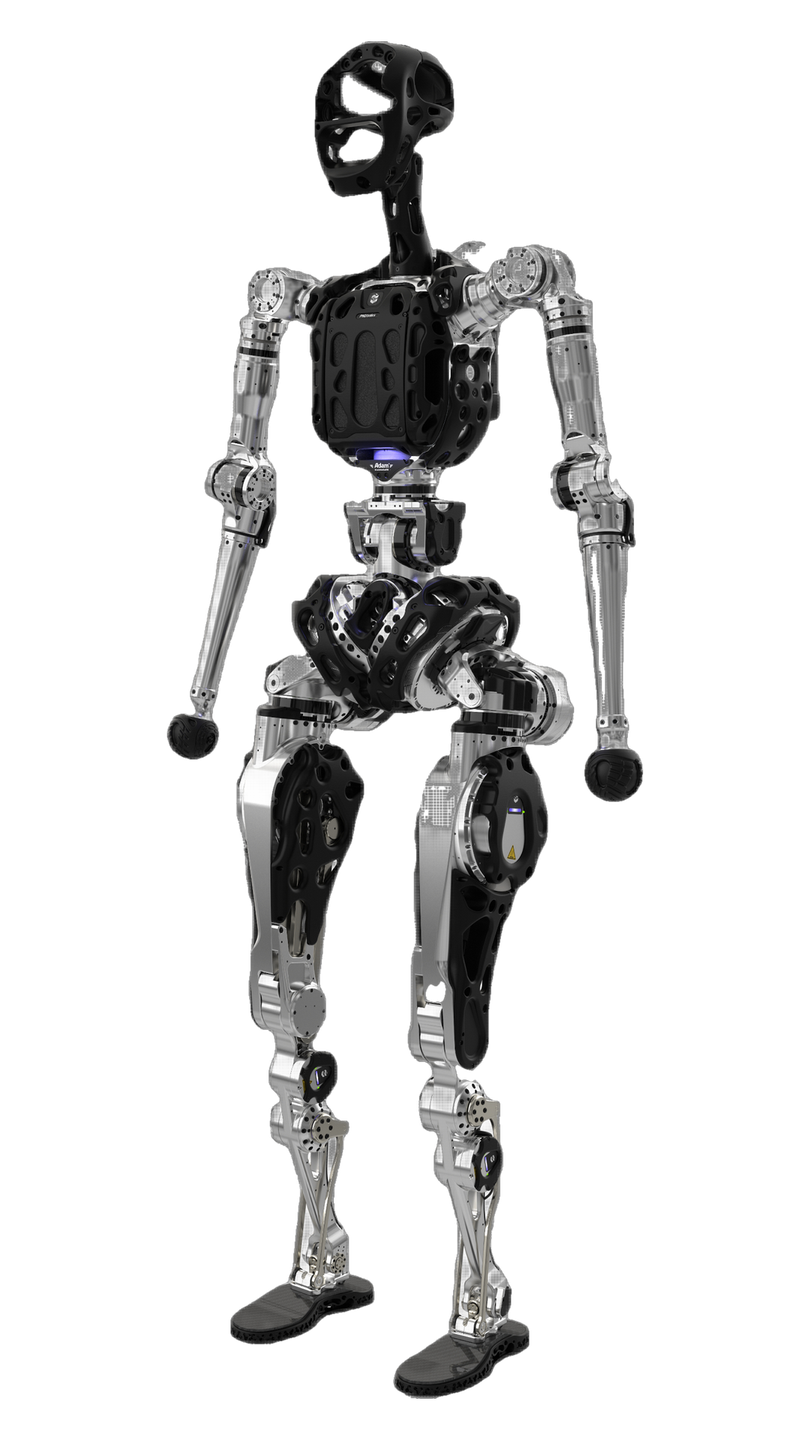
Designed as an open research platform, Adam supports industrial automation and logistics tests. Its top features include biomimetic gait control, high-impact resistance for real-world deployment, and a specialized vision system for autonomous object manipulation.
Adam by PNDbotics
Actuators
Proprietary PSA QDD actuators, up to 360 Nm peak torque
DoF (Domains of freedom)
41
°
Height
167
cm
Speed
N/A
m/s
Weight
62
kg
Payload
5
kg
Runtime
2.0
h
OS / AI System
DRL + imitation learning, WBC+MPC
Features the proprietary PSA technology, which combines high-torque density motors with integrated force-torque sensors. The control stack leverages deep reinforcement learning (DRL) for adaptive balancing and imitation learning for task execution.
Image:
PNDbotics
Current customers consist of academic robotics laboratories and industrial R&D departments. The platform is also being piloted by logistics firms exploring bipedal last-mile delivery and warehouse automation strategies.
Compared to earlier prototypes, the current Adam model features a refined bipedal gait controller that reduces power consumption by 20% while increasing lateral stability, allowing for more reliable navigation on slopes and stairs.
Employs Deep Reinforcement Learning to achieve a walking gait and limb coordination that closely mimics human kinematics, making its presence in shared workspaces feel more natural.
Built with dimensions (167cm height) that mirror the average human, allowing it to operate in environments and with tools originally designed for people.
Designed with safety-first joint control that allows the robot to react softly to physical contact, ensuring it can work safely in close proximity to human coworkers.



by
PNDbotics
A 167cm tall humanoid research platform with 41 DOF, designed for developers to test motion algorithms.




