Image:
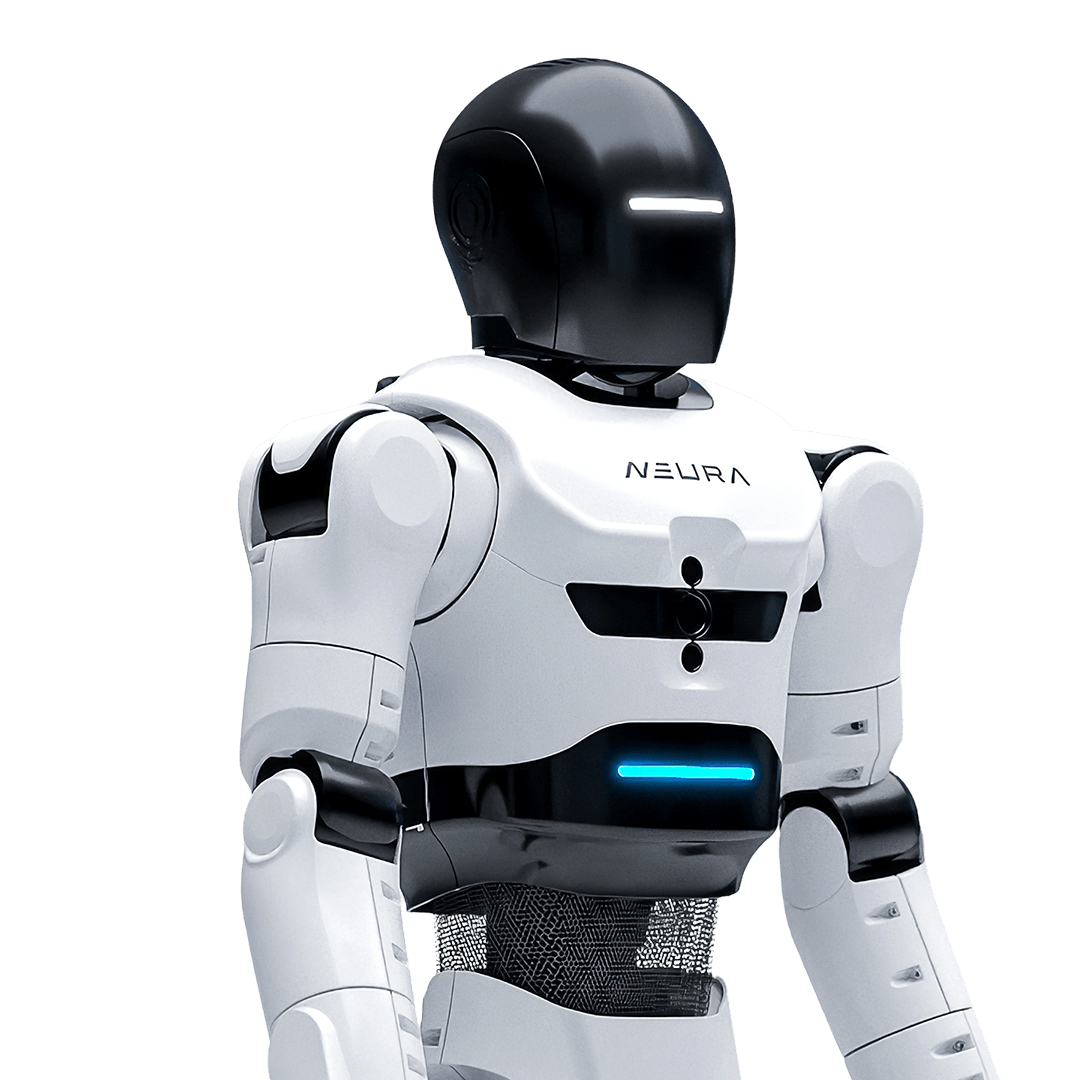
NEURA Robotics
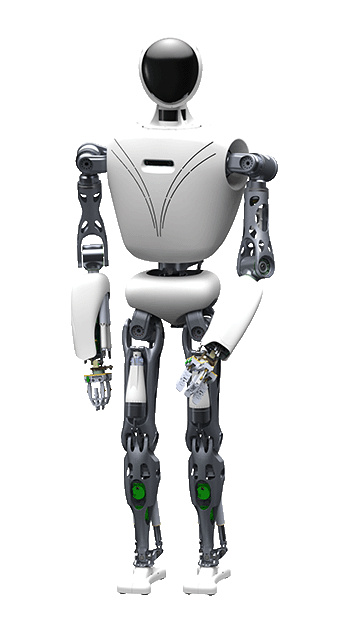
A cognitive humanoid robot with high-torque actuators and advanced sensory intelligence, built for complex tasks in human environments.

neuraOS

Height
180
cm

Weight
80
kg

Speed
1.0
m/s

Payload
20
kg

Mobility
Bipedal

Actuators
Neura actuators

DoF (Domains of freedom)
53
°

The first cognitive OS for multi-modal sensory fusion.
Certified to work alongside humans without safety barriers.
High-precision feedback in every joint for max safety.
Capable of high-accuracy industrial assembly tasks.
A cognitive humanoid robot with high-torque actuators and advanced sensory intelligence, built for complex tasks in human environments.
Standing 180 cm and weighing 80 kg, the Gen 3.5 features high-resolution torque sensors and neuraOS for multi-modal sensory fusion. It is built for a 15 kg payload and 24/7 industrial duty cycles.
Image:
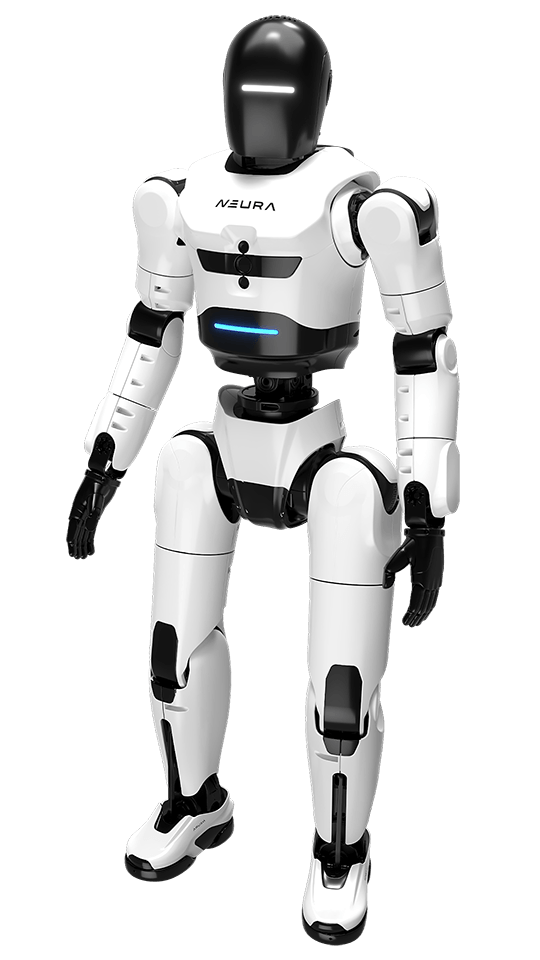
NEURA Robotics
A full-scale humanoid capable of working alongside humans without safety cages. It uses touchless human detection to ensure absolute safety during complex assembly and logistics tasks.
4NE-1 Gen 3.5 by NEURA Robotics
Actuators
Neura actuators
DoF (Domains of freedom)
53
°
Height
180
cm
Speed
1.0
m/s
Weight
80
kg
Payload
20
kg
Runtime
4
h
OS / AI System
neuraOS
Bipedal
neuraOS
A real-time cognitive operating system that fuses vision, audio, and touch into a single world model, enabling sub-millimeter precision in industrial applications.
Image:
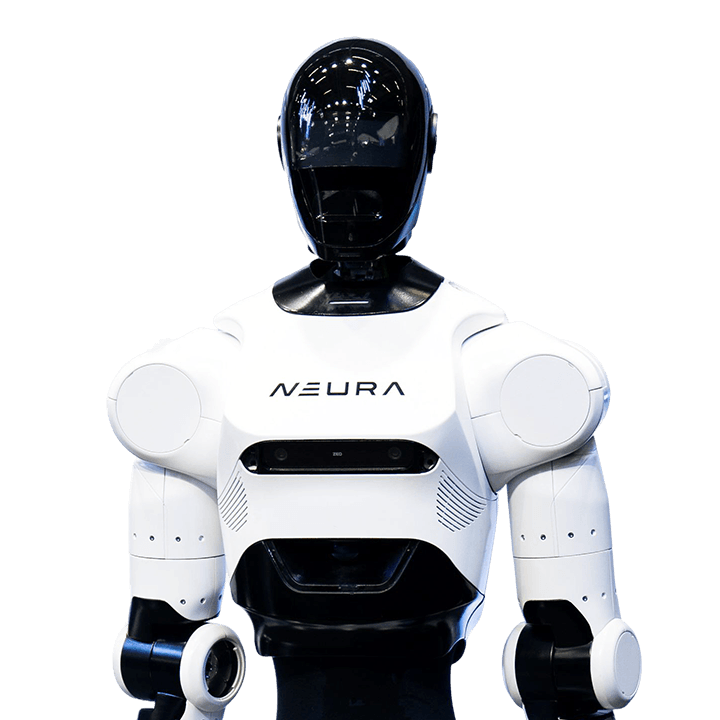
NEURA Robotics
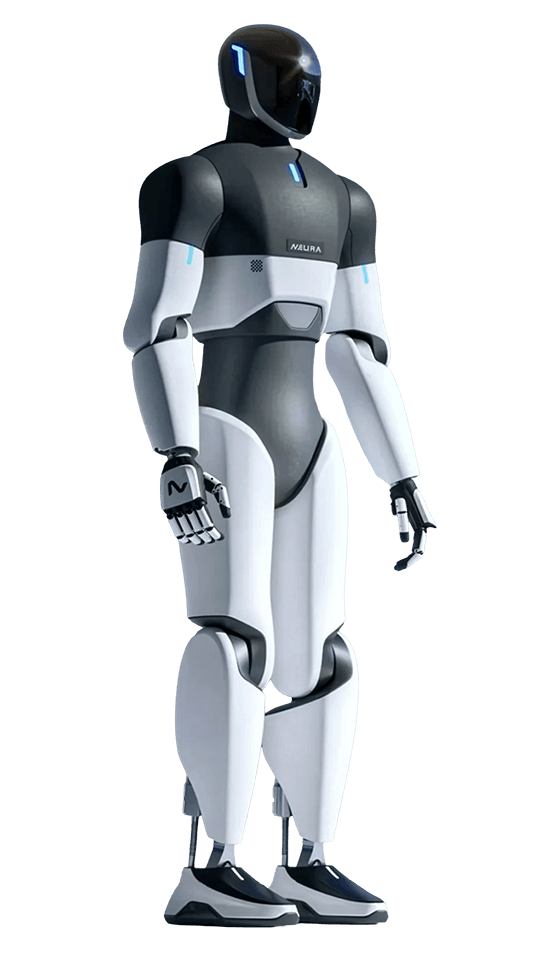
Targeted at small to medium-sized manufacturing enterprises (SMEs) in Europe that require safe, cage-free automation. Its neuraOS attracts customers looking for "cognitive" robots that can adapt to changing factory layouts.
The Gen 3.5 introduces neuraOS, a cognitive layer that fuses all sensory data into a unified world model. It improves on earlier prototypes with torque sensors in every joint, enabling sub-millimeter precision and certified cage-free operation.
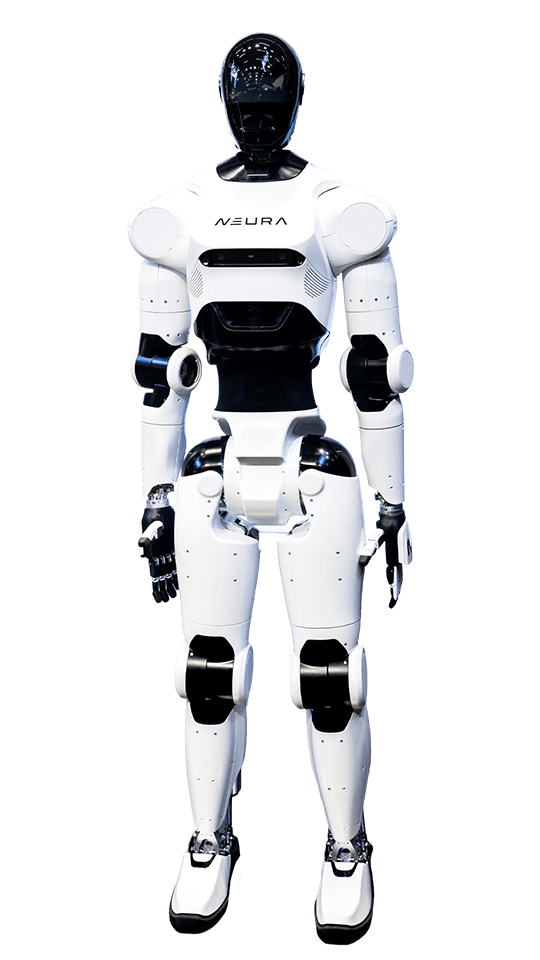
Uses neuraOS to sense and predict human movement, ensuring safe collaboration in shared spaces.
Features high-precision force control in all joints to react softly to any unexpected human contact.
Matches average human height and reach, allowing it to operate in any environment designed for people.



by
Neura Robotics
A cognitive humanoid robot with high-torque actuators and advanced sensory intelligence, built for complex tasks in human environments.
by
Neura Robotics
A compact version of the 4NE-1 platform, optimized for research, education, and lighter service tasks in indoor settings.
by
Neura Robotics
Europe's leading cognitive humanoid robot, engineered for safe, intelligent automation in industrial workflows and everyday assistance.

by
DFKI
A 2-meter tall, 62.5kg humanoid robot developed as an assistance robot for autonomous or teleoperated missions in human-optimized environments, such as a future moon station.