Image:
Heiner Peters, DFKI
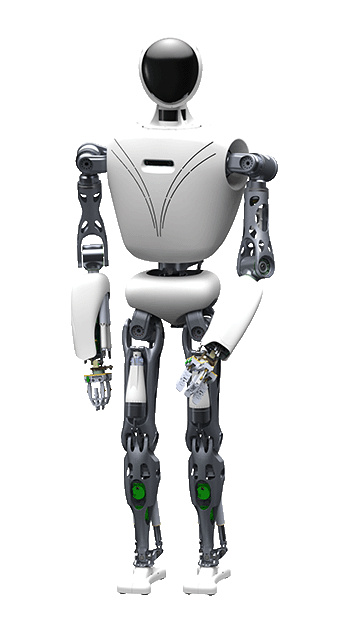
A 2-meter tall, 62.5kg humanoid robot developed as an assistance robot for autonomous or teleoperated missions in human-optimized environments, such as a future moon station.



A sophisticated platform for testing hybrid drive concepts and whole-body control.
Engineered with a focus on future planetary exploration and extreme environment tasks.
Highly adaptable limbs and sensors designed for academic and industrial experimentation.
Advanced series elastic actuators for safe and compliant human-robot interaction.
A 2-meter tall, 62.5kg humanoid robot developed as an assistance robot for autonomous or teleoperated missions in human-optimized environments, such as a future moon station.
RH5 is a 200 cm research humanoid specialized for hybrid autonomous and teleoperated control via an exoskeleton. Weighing 62 kg, it features a complex sensor stack including Velodyne LiDAR and force-torque sensors at the wrists and ankles. It is designed for infrastructure establishment and logistics, allowing human operators to "feel" the robot's interactions through haptic feedback systems.
Image:
Heiner Peters, DFKI
A specialized space-assistant featuring a hybrid serial-parallel architecture, designed for intuitive teleoperation via exoskeleton to establish lunar and orbital infrastructures.
RH5 by DFKI
Actuators
Series Elastic
DoF (Domains of freedom)
32
°
Height
200
cm
Speed
0.4
m/s
Weight
62.5
kg
Payload
1
kg
Runtime
N/A
h
OS / AI System
Multimodal LLM
Employs a Serial-Parallel Hybrid Architecture and RoboDrive BLDC motors with Harmonic Drives, designed for high-payload operations in lunar and orbital environments.
Utilizes a haptic exoskeleton interface and Velodyne LiDAR, allowing human pilots to remotely control the bot with immersive 3D-sensing and force-reflective feedback.
Image:
Heiner Peters, DFKI
The RH5 is a research platform, not a commercial product. Its 'customers' are other research projects within DFKI and its partners, such as the TransFIT project (for space and industry 4.0) and the VeryHuman project (for learning complex behaviors).
Compliant joint behavior mimics muscle-like motion.
Designed to operate at human-height surfaces.
Maintains balance during lifting and walking.




by
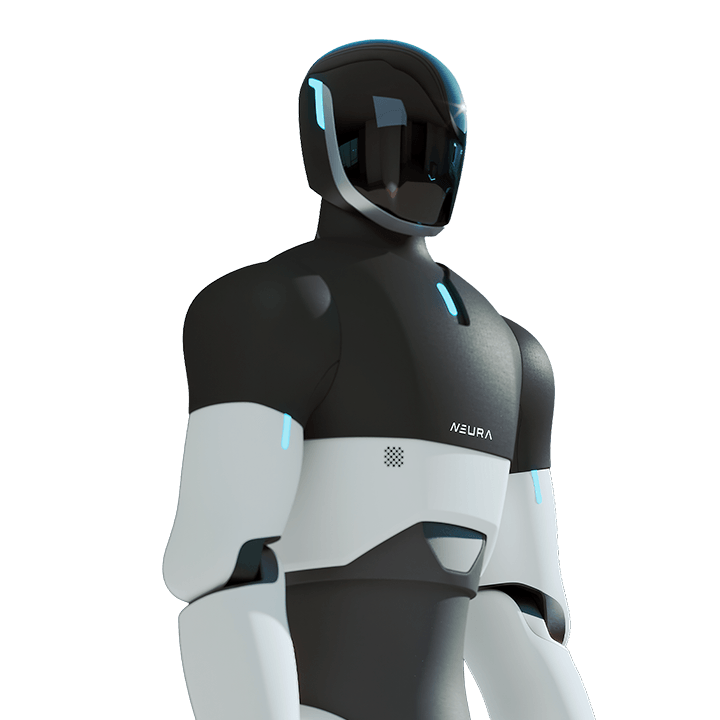
Neura Robotics
A cognitive humanoid robot with high-torque actuators and advanced sensory intelligence, built for complex tasks in human environments.
by
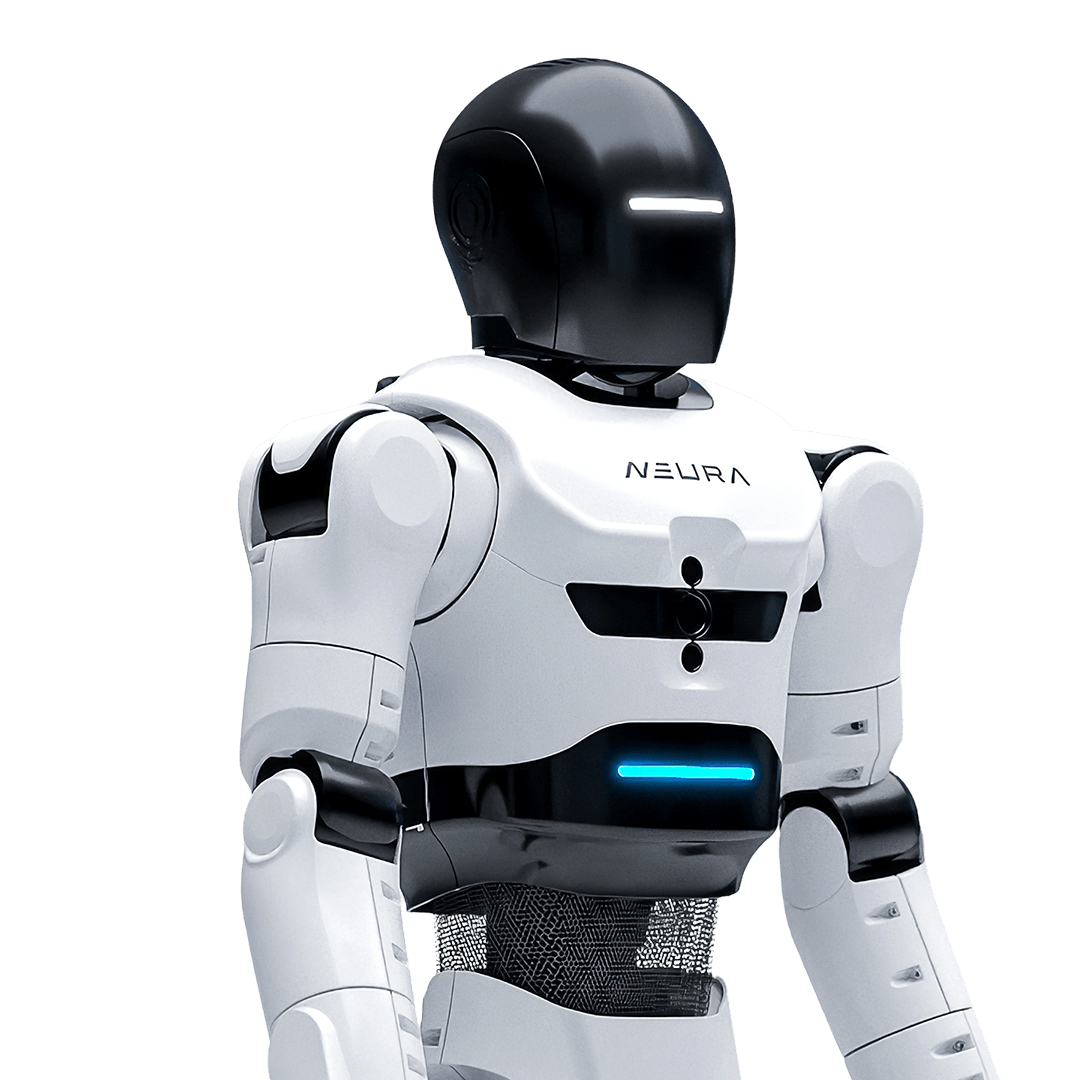
Neura Robotics
A compact version of the 4NE-1 platform, optimized for research, education, and lighter service tasks in indoor settings.
by
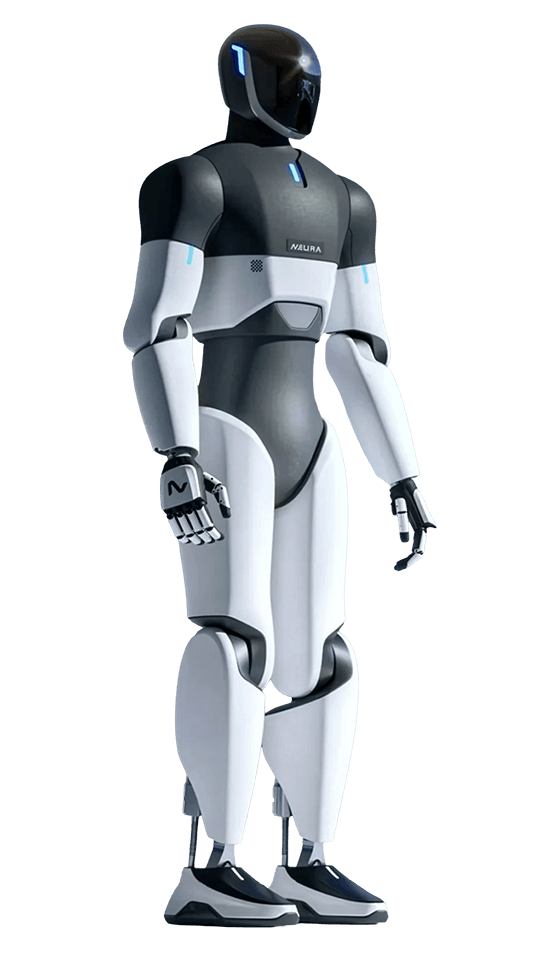
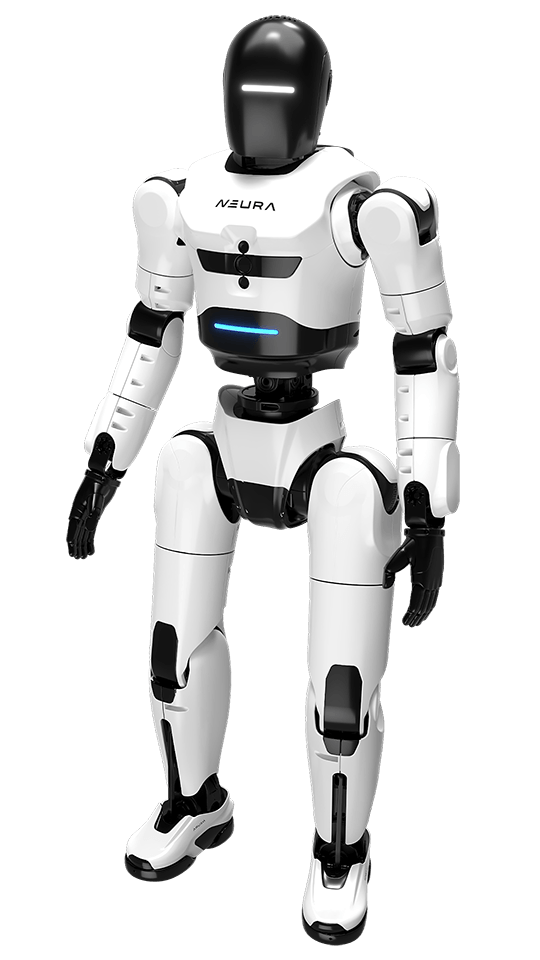
Neura Robotics
Europe's leading cognitive humanoid robot, engineered for safe, intelligent automation in industrial workflows and everyday assistance.
by
DFKI
A 2-meter tall, 62.5kg humanoid robot developed as an assistance robot for autonomous or teleoperated missions in human-optimized environments, such as a future moon station.