Learn what this feature means, why it is essential, and how it is used across different humanoid robots.
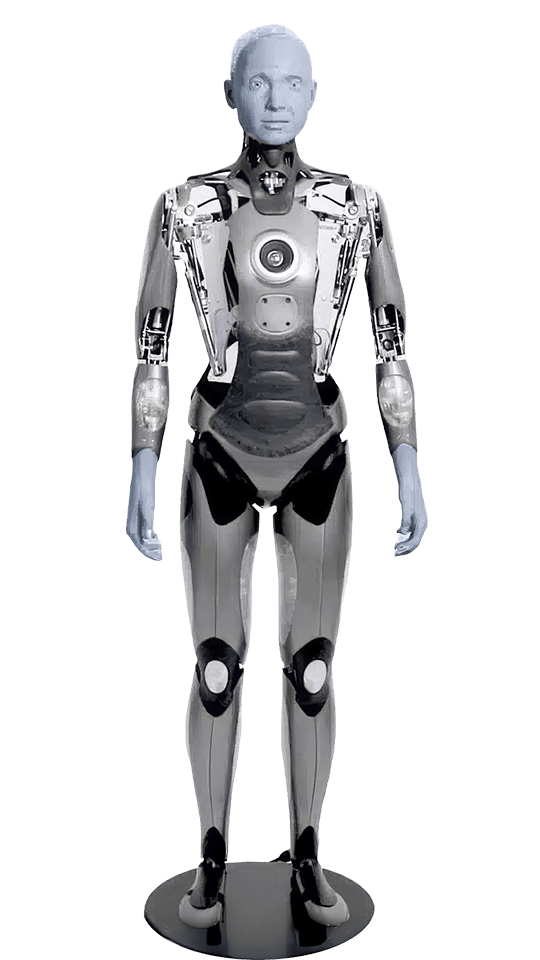
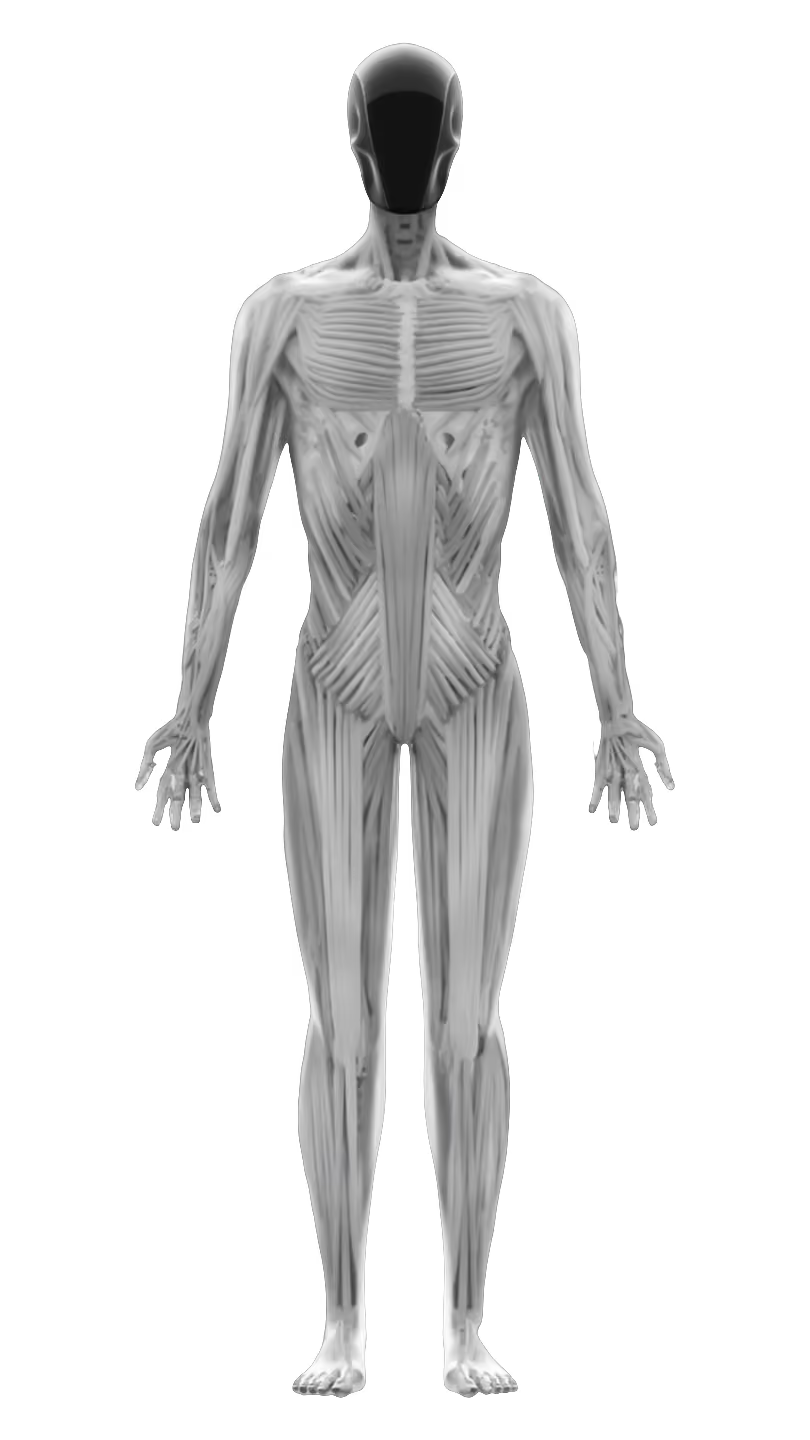
Anthropomorphic Design. Human-like form to operate in environments designed for people.
A strategic choice to create a general-purpose machine that can seamlessly integrate into human-centric environments built by and for humans. This minimizes the need for costly infrastructure modifications.
Examples
Models like Apollo, Digit, and Phoenix have heights and weights similar to an average human adult, allowing them to use existing infrastructure like doors, tools, and stairs. Figure's design philosophy is based on this concept.


by
Neura Robotics
Europe's leading cognitive humanoid robot, engineered for safe, intelligent automation in industrial workflows and everyday assistance.
by
Neura Robotics
A cognitive humanoid robot with high-torque actuators and advanced sensory intelligence, built for complex tasks in human environments.

by
Hexagon
A humanoid robot designed for industrial inspection and quality control, integrating advanced sensors.

by
KAIST Hubo Lab
Albert HUBO (2005) was the world’s first android with a head mounted on a life-size walking robotic frame and the world’s first walking humanoid robot.
by
IHMC Robotics
A next-generation bipedal research humanoid for outdoor urban operations and extreme environments, successor to IHMC's Nadia.

by
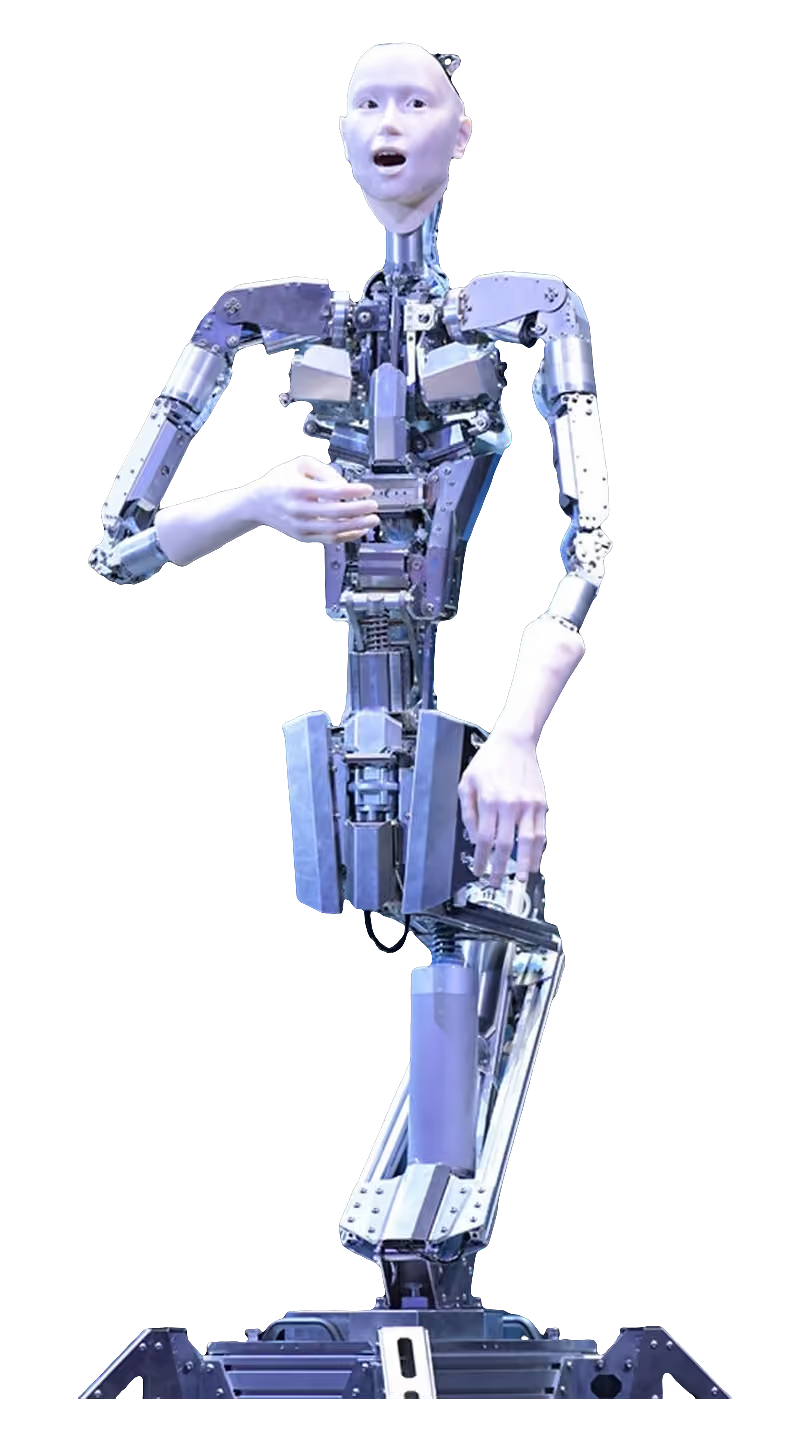
An android robot for research and art, designed to explore "what life itself may mean" through autonomous, non-programmed movement generated by an internal neural network.

by
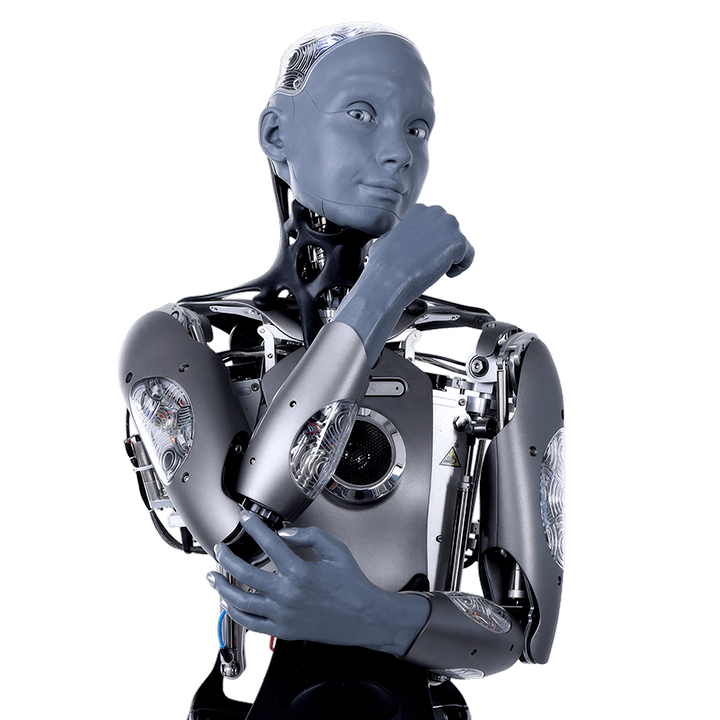
Engineered Arts
The world's most advanced lifelike humanoid robot, designed as a platform for AI development and human-robot interaction with ultra-realistic facial expressions.

by
Clone Robotics
An android torso with a highly detailed, biomimetic musculoskeletal hand and arm system.

by
Xiaomi
A full-sized bipedal humanoid robot capable of perceiving 3D space, recognizing human emotions, and performing balance-intensive tasks.
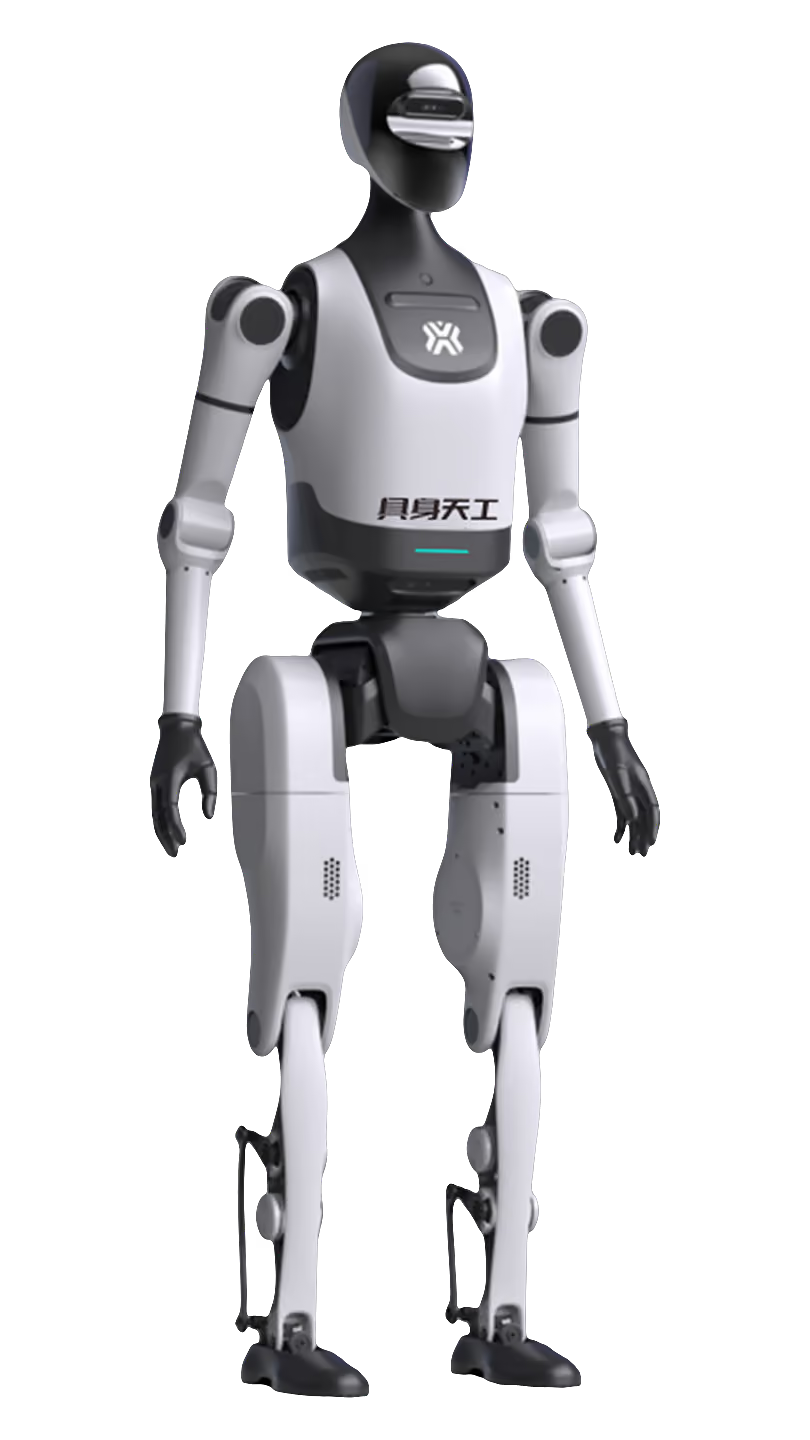
by
X-Humanoid
A full-size humanoid robot developed for general-purpose applications.
by
ergoCub Project
A collaborative humanoid robot research project aimed at reducing physical risk and improving ergonomics for workers in industrial settings.

by
Galbot
A full-sized, electric-powered bipedal humanoid robot focused on autonomous task execution.

by
Unitree Robotics
A general-purpose, full-size humanoid robot focused on affordability and high-performance locomotion.

by
Fourier Intelligence
A high-performance humanoid platform for developers, featuring 12-DoF dexterous hands and high-torque actuators for complex manipulation.
by
Unitree Robotics
A versatile and powerful full-sized humanoid robot known for its high-speed walking and advanced power performance in its class.

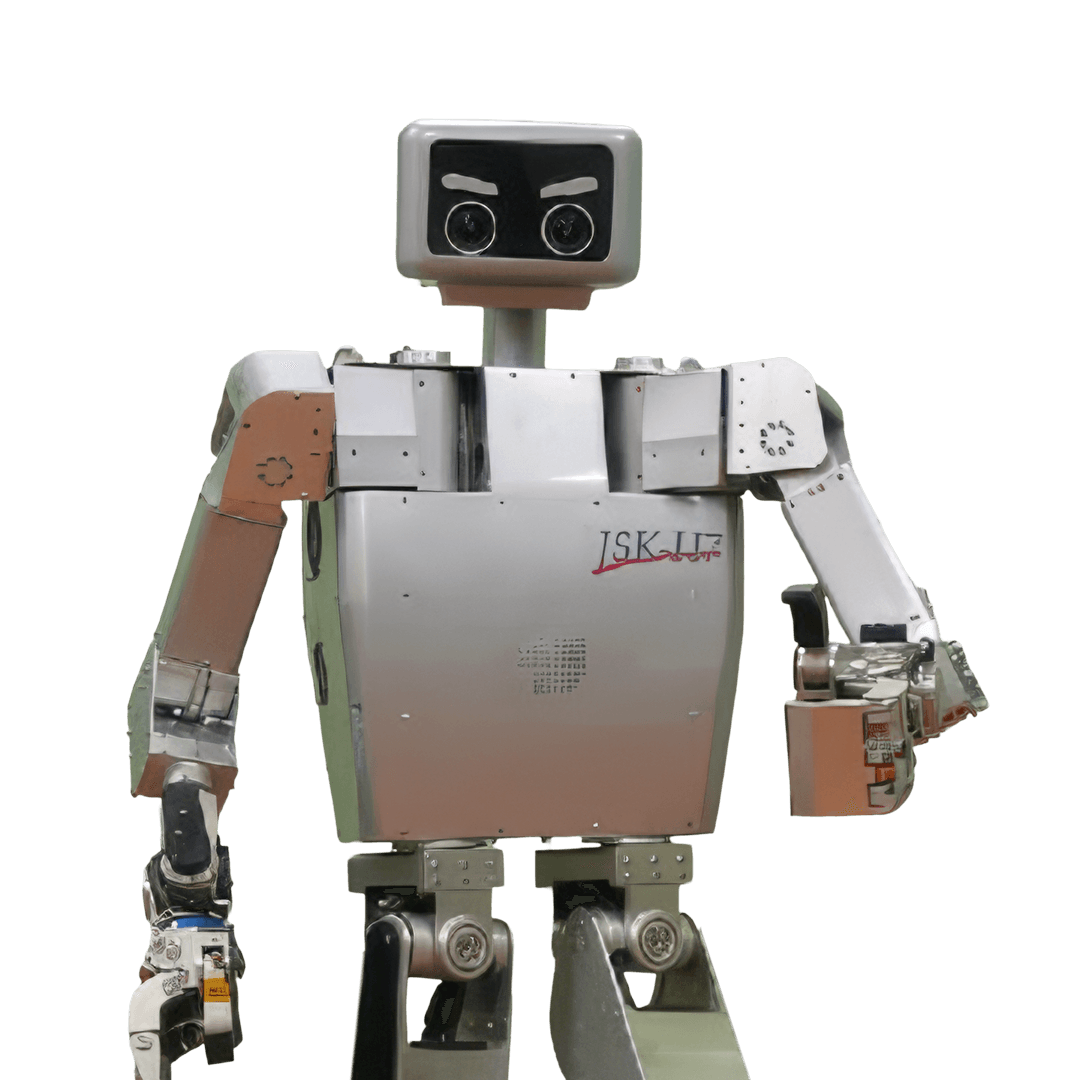
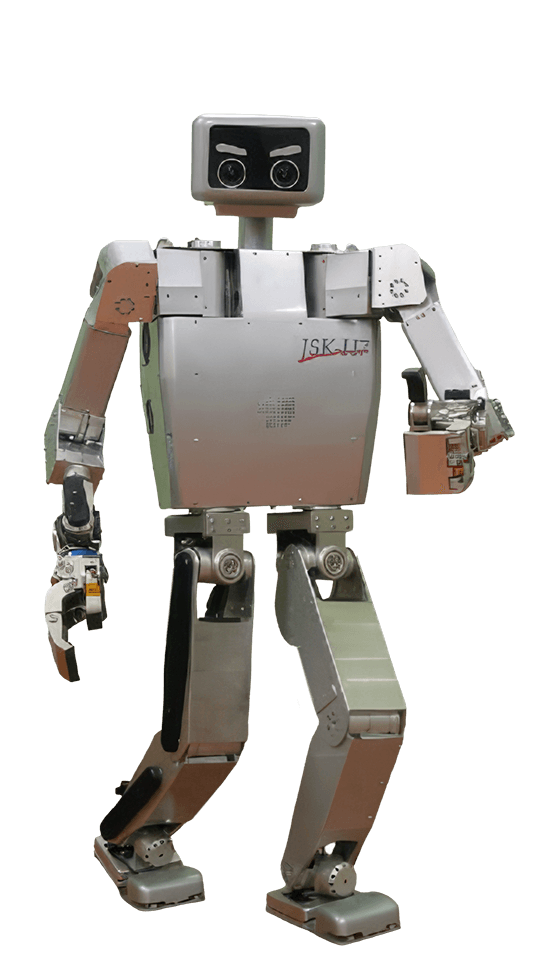
by
University of Tokyo
A successor to H6, this is a full-body, lightweight humanoid for research in real-world, dynamic interaction.

by
Humanoid
A general-purpose bipedal humanoid robot focused on AI-driven autonomous tasks in human environments.
by
XPeng
An in-development bipedal humanoid robot designed for autonomous tasks within XPeng's manufacturing facilities.

by
ROBOTERA
A full-size bipedal humanoid with 55 DoF and 4 m/s running speed, built for industrial automation and dynamic performance.

by
Softbank Robotics
A small, interactive, and programmable humanoid robot widely used in education, research, and healthcare.
by
Maxtronics
A small, interactive, and programmable humanoid robot widely used in education, research, and healthcare.

by
1X Technologies
A prototype home humanoid designed for safe interaction in domestic environments, focusing on natural movement and task learning.
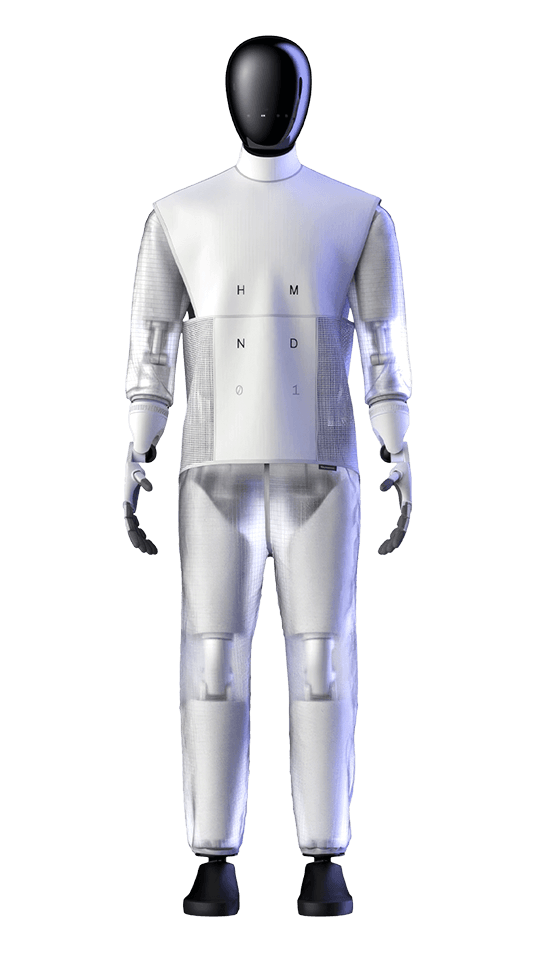
by
1X Technologies
The next-generation domestic humanoid featuring a muscle-like soft body design and advanced visual manipulation for household tasks.
by
Stanford Robotics Lab
A "humanoid diver" robot designed for underwater exploration and teleoperated manipulation in deep-sea environments.
by
Softbank Robotics
A human-sized, wheeled robot designed for social interaction, widely used in retail and hospitality.

by
Sanctuary AI
A general-purpose, carbon-fiber humanoid robot designed for autonomous work, powered by the 'Carbon' AI control system.

by
EngineAI
An advanced, full-size humanoid robot designed for general-purpose tasks and AI integration.

by
Hanson Robotics
Sophia is a well-known social humanoid robot and AI platform, famous for its human-like appearance and conversational abilities. Sophia 2020 robotics platform is available for research, academic, and B2B applications.

by
Waseda University
Developed in 1973, it was the world's first full-scale anthropomorphic robot, able to walk and communicate.
by
Waseda University
An anthropomorphic robot developed in the 1980s, specializing in playing musical instruments.

by
UBTECH Robotics
A full-sized bipedal humanoid robot designed for service and assistance in home and commercial settings.
by
UBTECH Robotics
An upgraded, industrial-focused version of Walker, designed for tasks in manufacturing and logistics.