Image:
Waseda University
Developed in 1973, it was the world's first full-scale anthropomorphic robot, able to walk and communicate.


Height
130
cm

Weight
130
kg

Speed
N/A
m/s

Payload
N/A

Actuators
Electro-Hydraulic

DoF (Domains of freedom)
26
°

As the world’s first full-scale humanoid, WABOT-1 blazed the trail for every robot we see today by proving a machine could walk and talk.
Using its early camera "eyes" and artificial ears, it could measure distances to objects and even recognize your voice commands.
It was the first to combine vision, limb control, and conversation into one system, letting it interact with you like a real partner.
With its tactile-sensing hands, it was already learning how to grip and move tools back in the early 1970s.
Developed in 1973, it was the world's first full-scale anthropomorphic robot, able to walk and communicate.
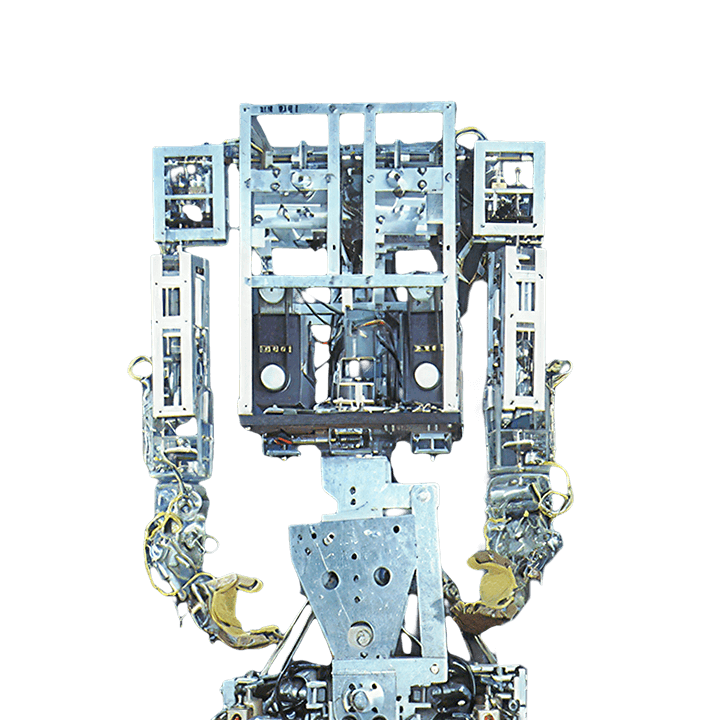
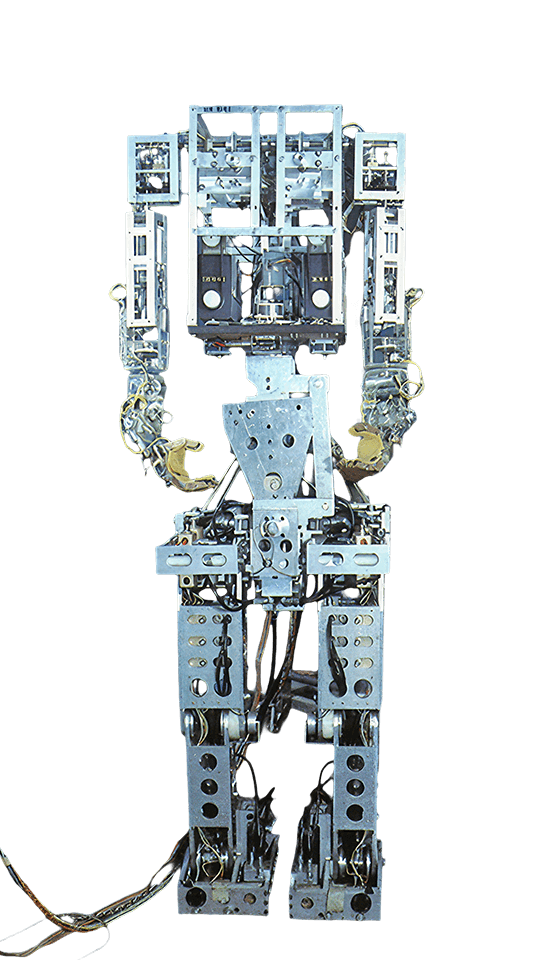
Completed in 1973, WABOT-1 was the world’s first full-scale anthropomorphic robot. It possessed a vision system, a limb control system, and a conversation system, allowing it to communicate in Japanese and measure distances to objects. Although primitive by modern standards, its ability to walk and grip objects marked the beginning of the quest to create machines in the image of man.
Image:
Waseda University
The world's first full-scale humanoid, a 1970s legend that paved the way for walking, talking, and sensing robots.
WABOT-1 by Waseda University
Actuators
Electro-Hydraulic
DoF (Domains of freedom)
26
°
Height
130
cm
Speed
N/A
m/s
Weight
130
kg
Payload
N/A
kg
Runtime
N/A
h
OS / AI System
N/A
Integrated the world's first conversational system in Japanese combined with a computer-based vision system for distance measurement and object recognition.
Featured a hydraulic drive system that, in 1973, realized autonomous bipedal walking and object grasping in an integrated platform for the first time.
Image:
Waseda University
Historical research archives of Waseda University and Japan’s National Museum of Nature and Science.
Primarily academic historians and researchers studying the evolution of bipedal robotics.
Capable of basic walking and manipulation.
Compared to early human developmental stages.
Understood spoken Japanese and measured distances.



by
Maxtronics
A small, interactive, and programmable humanoid robot widely used in education, research, and healthcare.
by
Tokyo Robotics
A torque-controlled humanoid robot designed as a research platform for advanced manipulation and HRI.
by
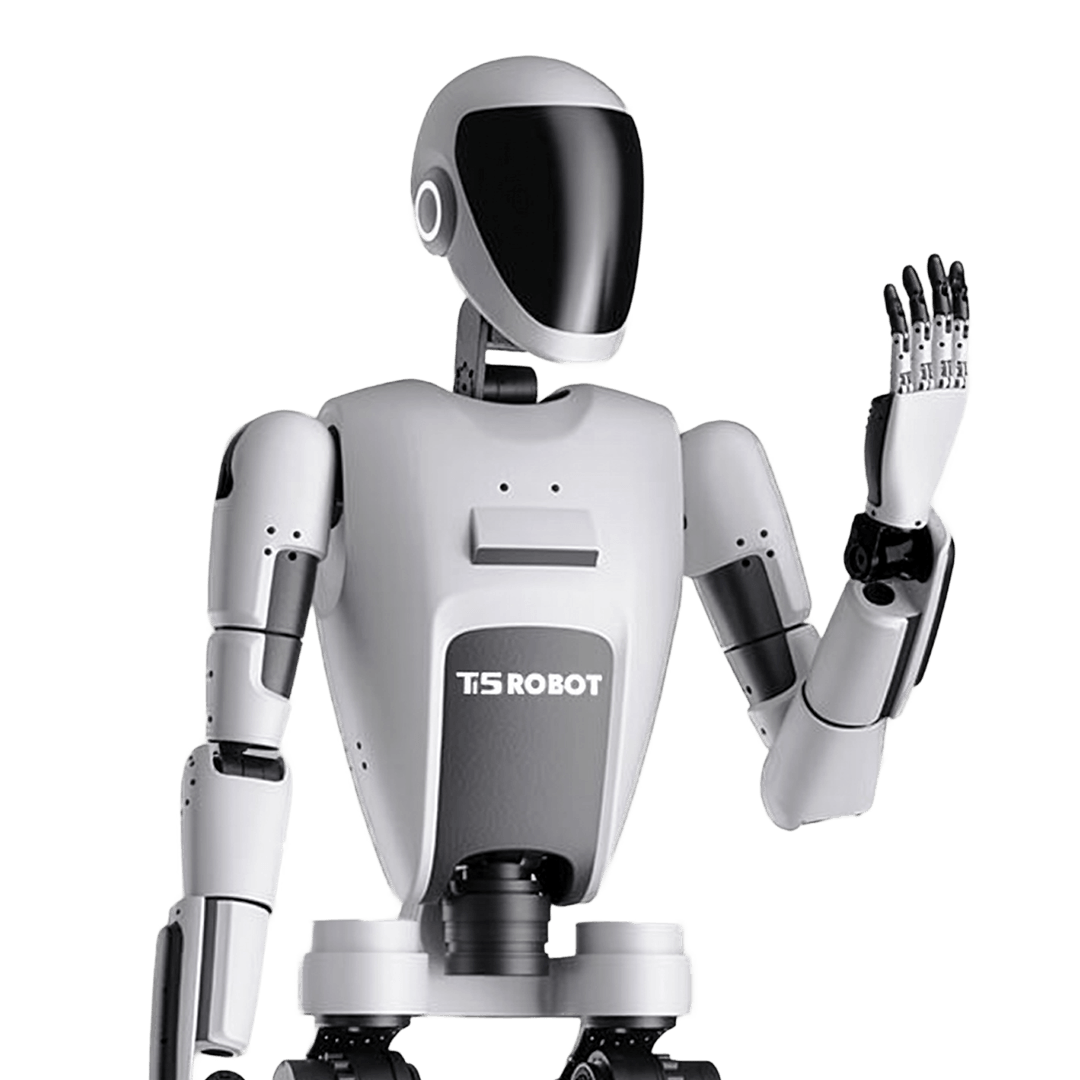
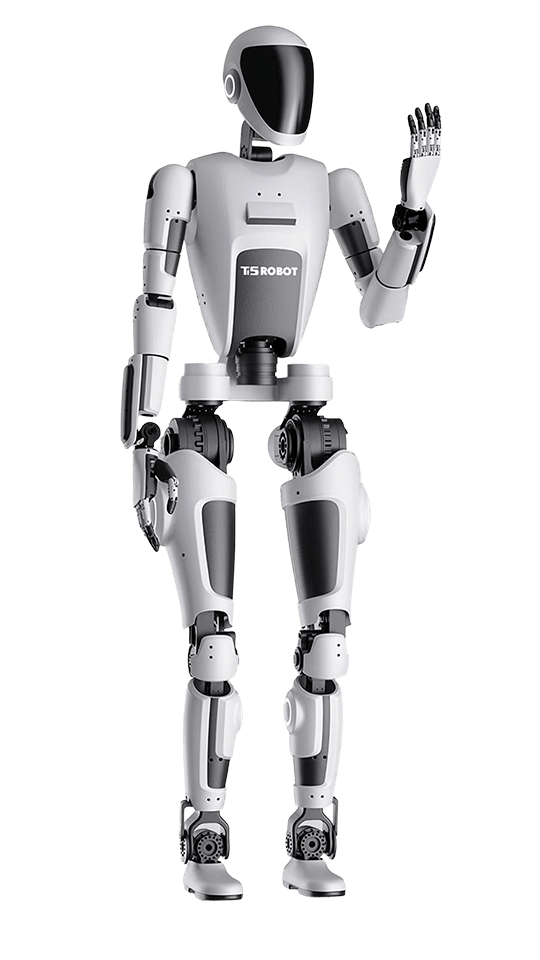
Ti5 Robot
A 1.7m bipedal platform with high torque density joints, capable of dynamic movements like jumping.
by
Tencent Robotics X
Also known as "The Five", a hybrid robot that can switch between walking and wheeled modes for elderly care.