Learn what this feature means, why it is essential, and how it is used across different humanoid robots.
Locomotion (e.g., rolling, walking, flying)
This is a crucial feature that defines a robot's operational flexibility. A robot's ability to navigate and move autonomously in dynamic environments.
Examples
Mobile manipulators combine the mobility of a mobile platform with the dexterity of a robotic arm, allowing them to move freely and perform complex tasks.


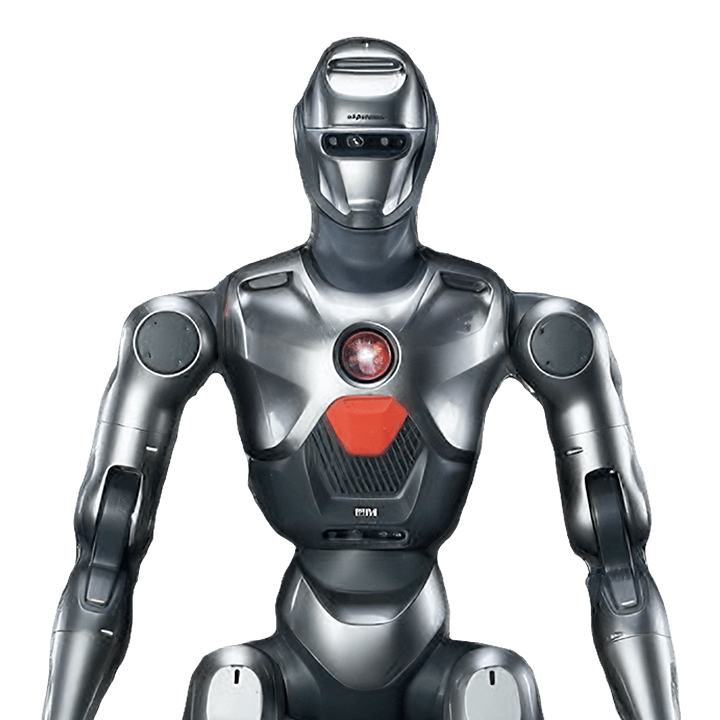
by
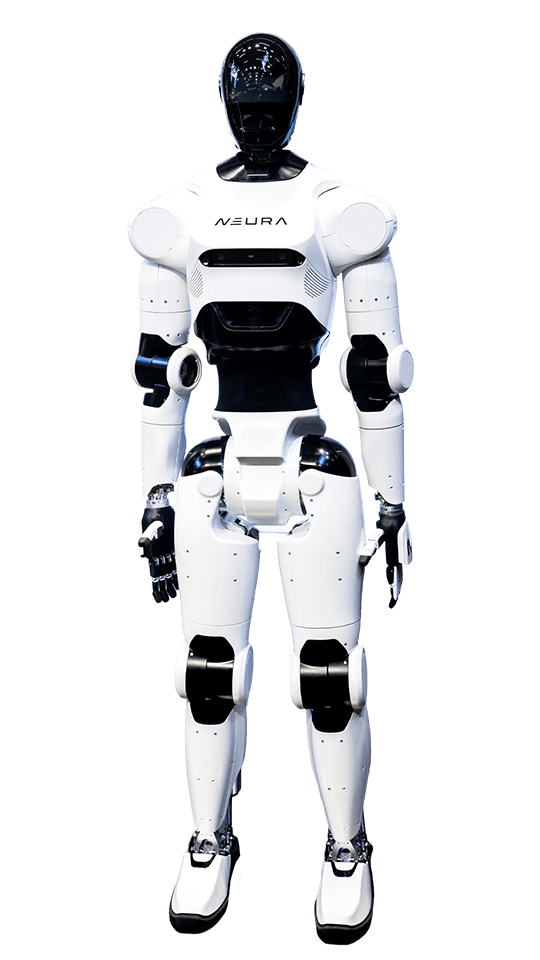
Neura Robotics
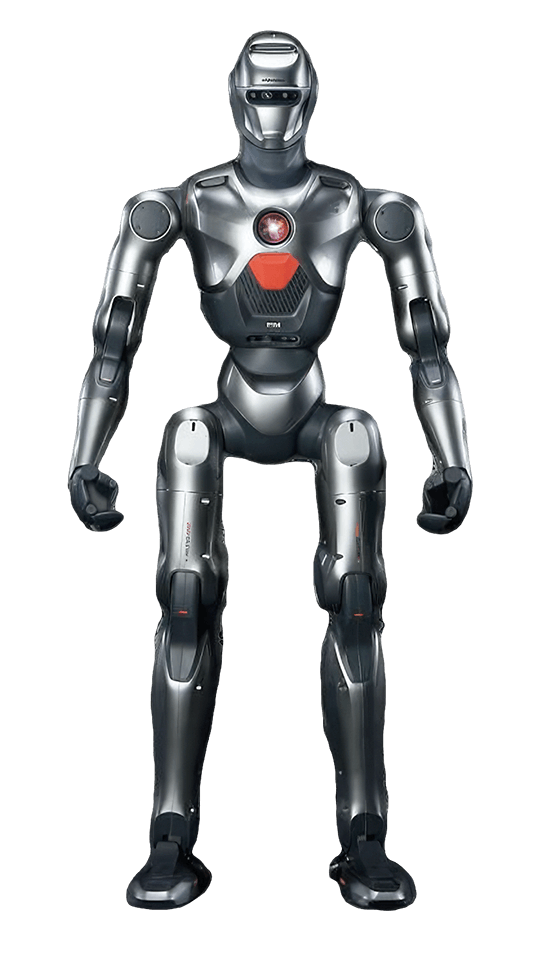
Europe's leading cognitive humanoid robot, engineered for safe, intelligent automation in industrial workflows and everyday assistance.
by
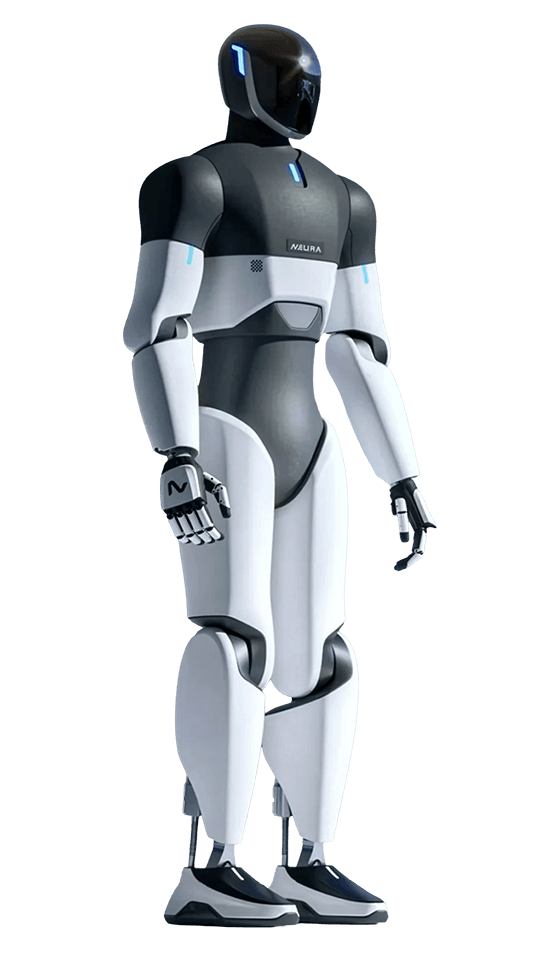
Neura Robotics
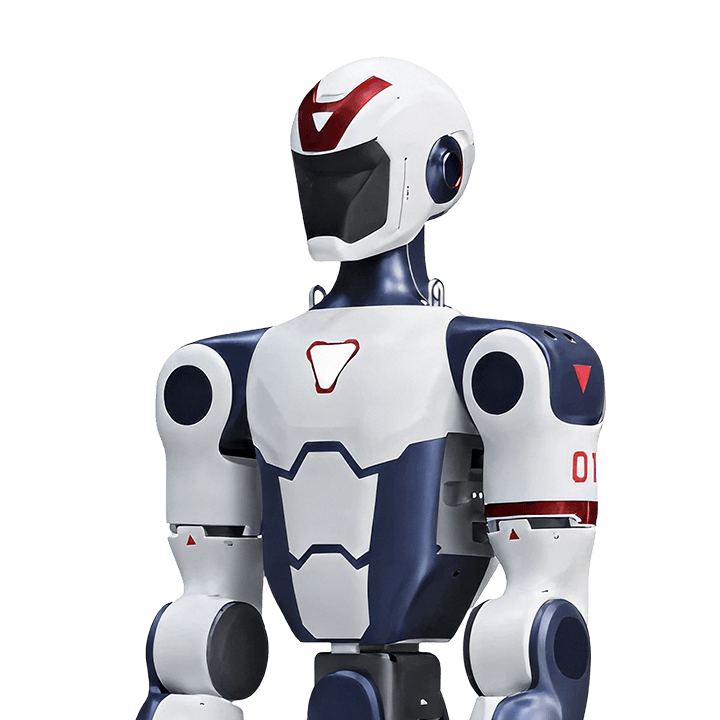
A cognitive humanoid robot with high-torque actuators and advanced sensory intelligence, built for complex tasks in human environments.

by
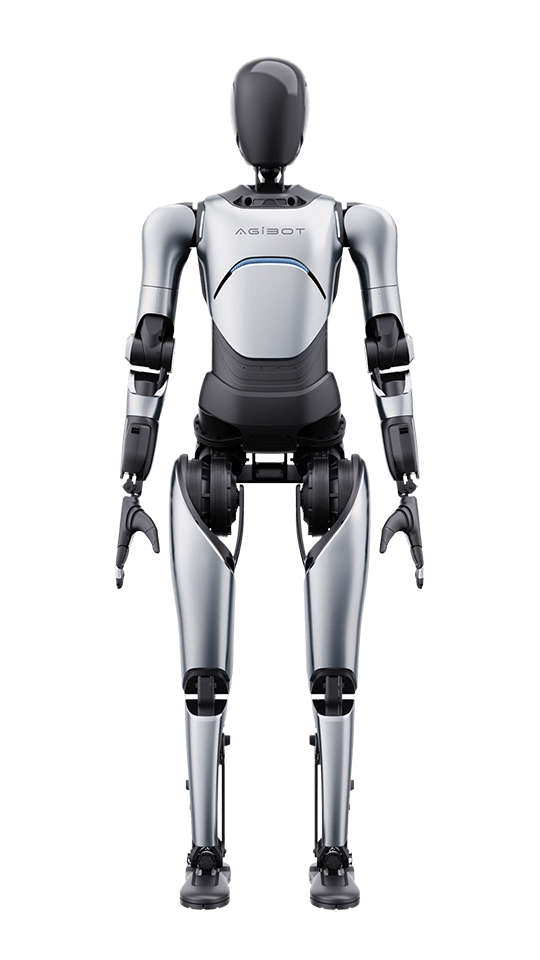
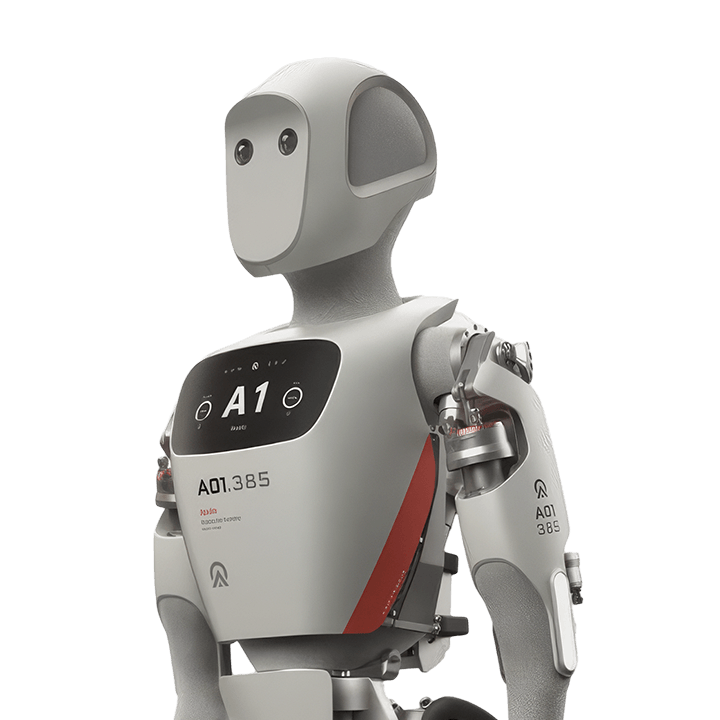
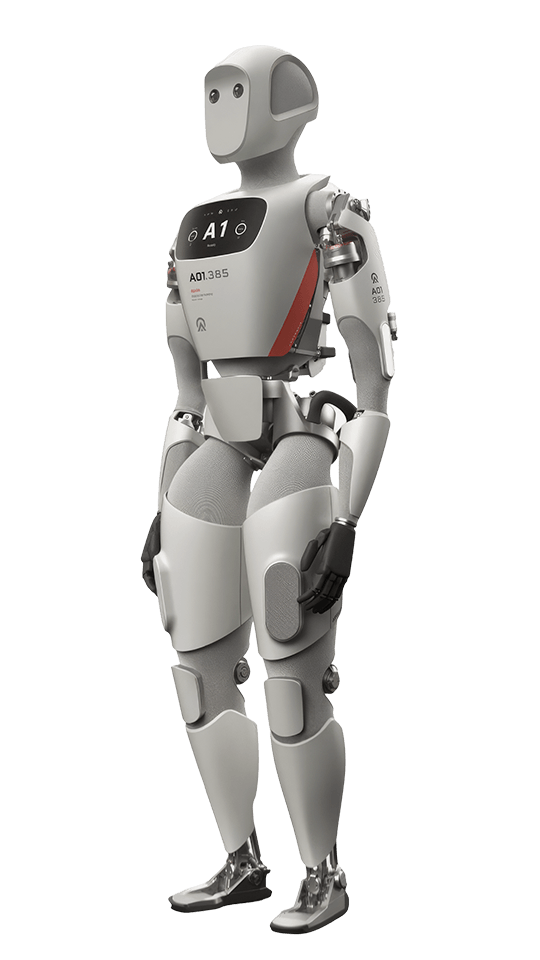
AgiBot
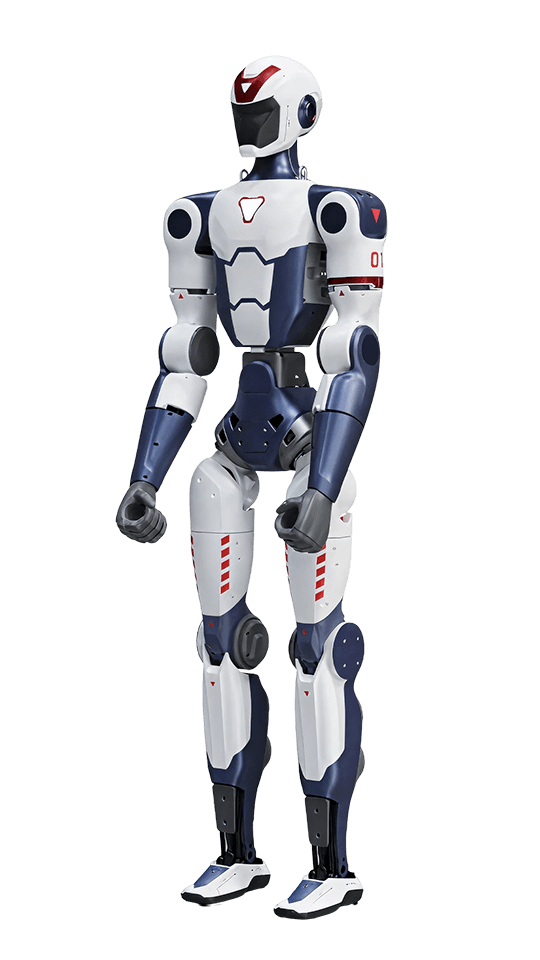
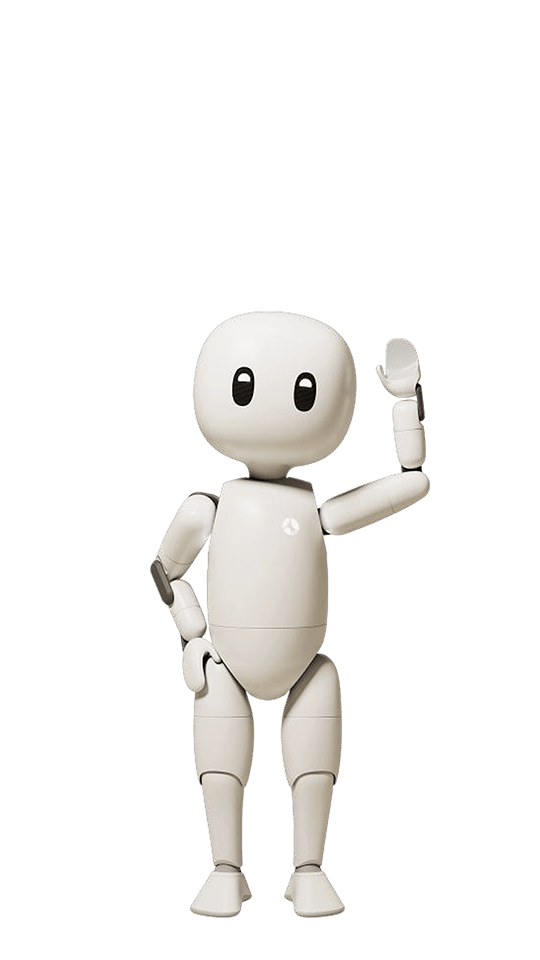
An interactive service humanoid robot designed for commercial and industrial applications, in mass production since late 2024.

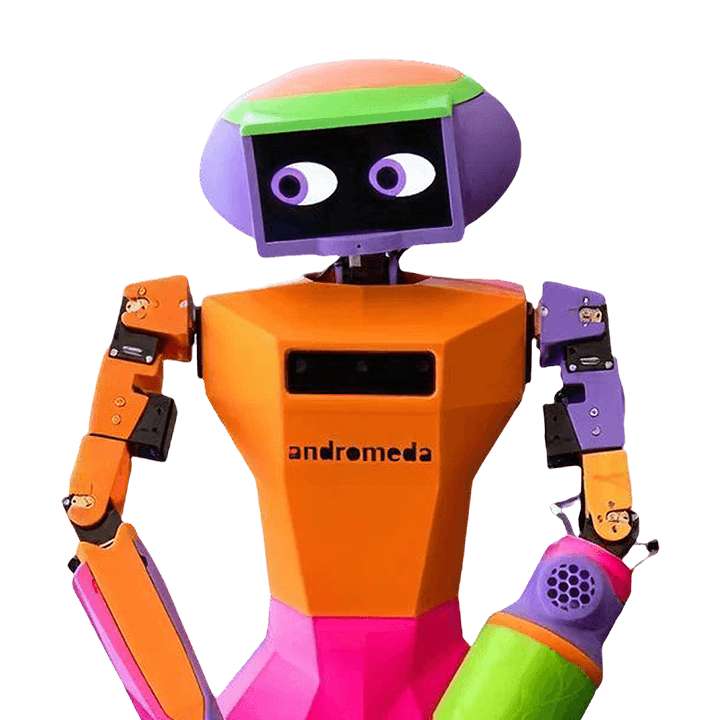
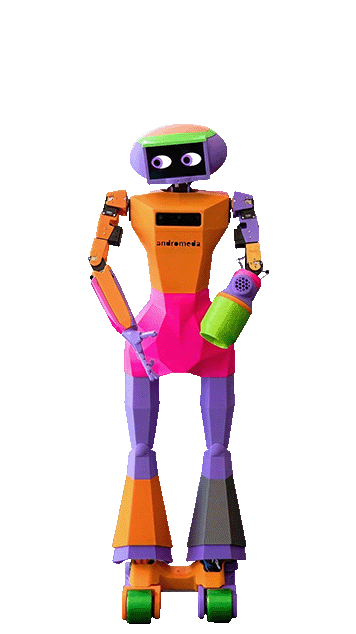
by
andromeda
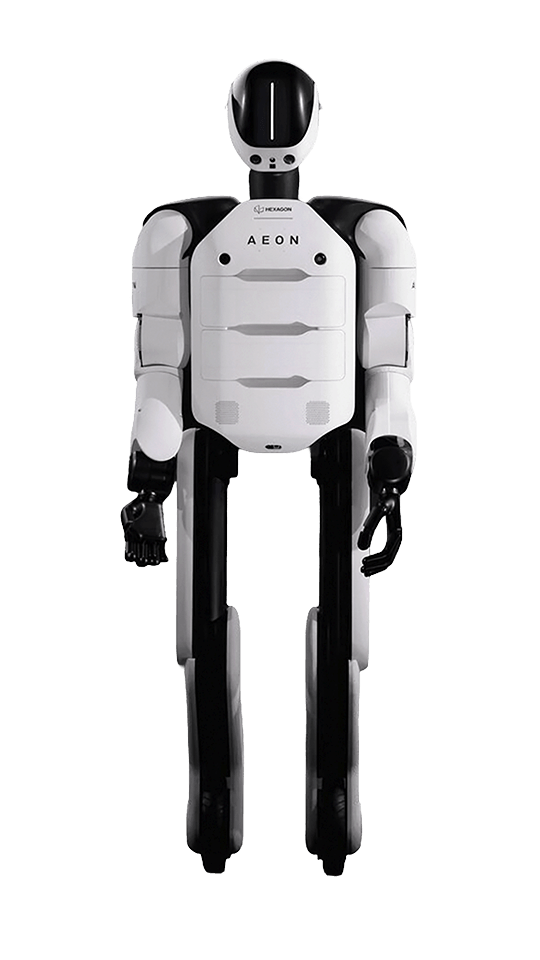
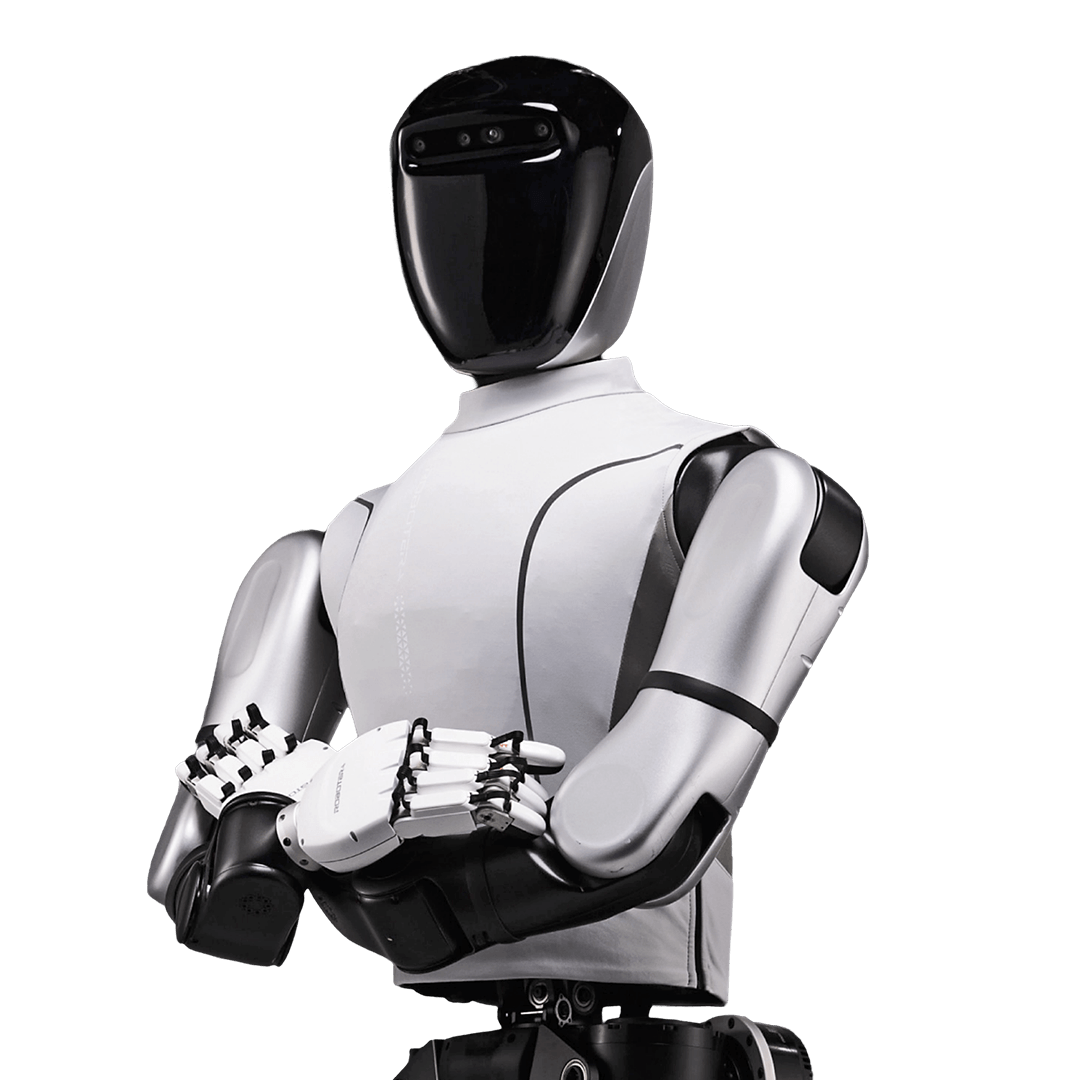
A social humanoid robot designed as a companion for aged care and assisted living, capable of speaking over 90 languages to improve resident wellbeing.

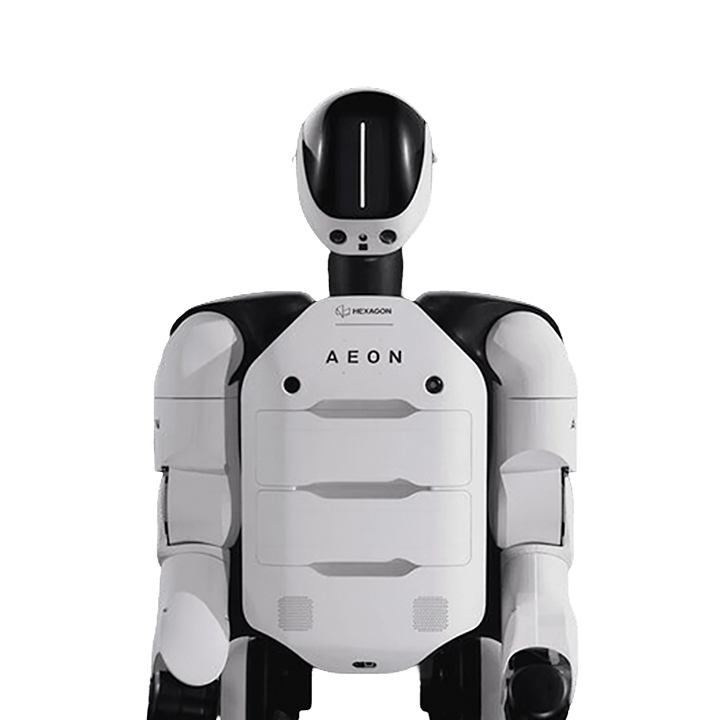
by
Hexagon
A humanoid robot designed for industrial inspection and quality control, integrating advanced sensors.

by
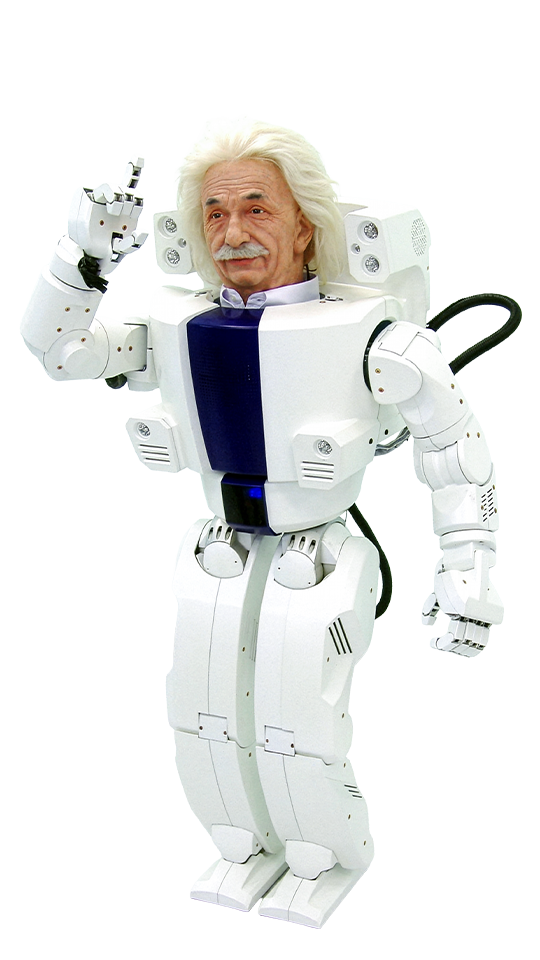
KAIST Hubo Lab
Albert HUBO (2005) was the world’s first android with a head mounted on a life-size walking robotic frame and the world’s first walking humanoid robot.

by
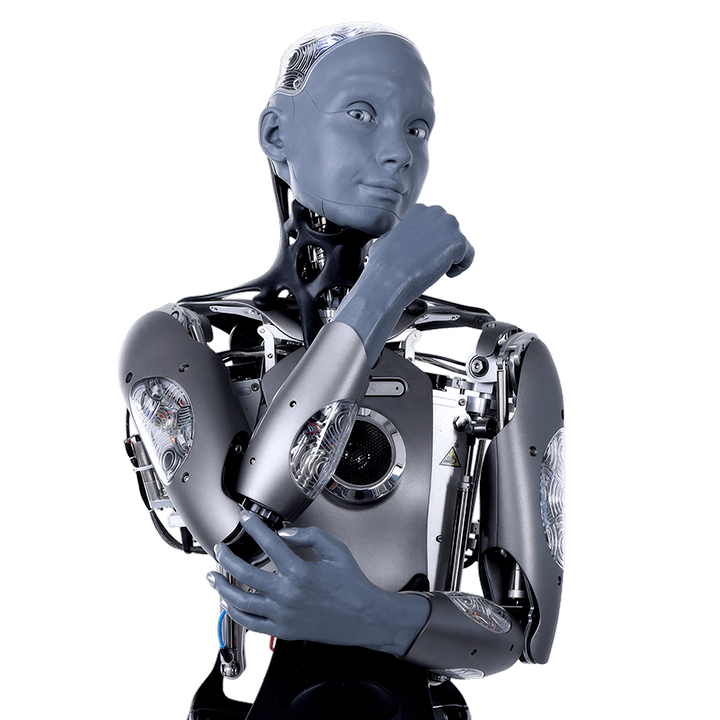
Engineered Arts
The world's most advanced lifelike humanoid robot, designed as a platform for AI development and human-robot interaction with ultra-realistic facial expressions.

by
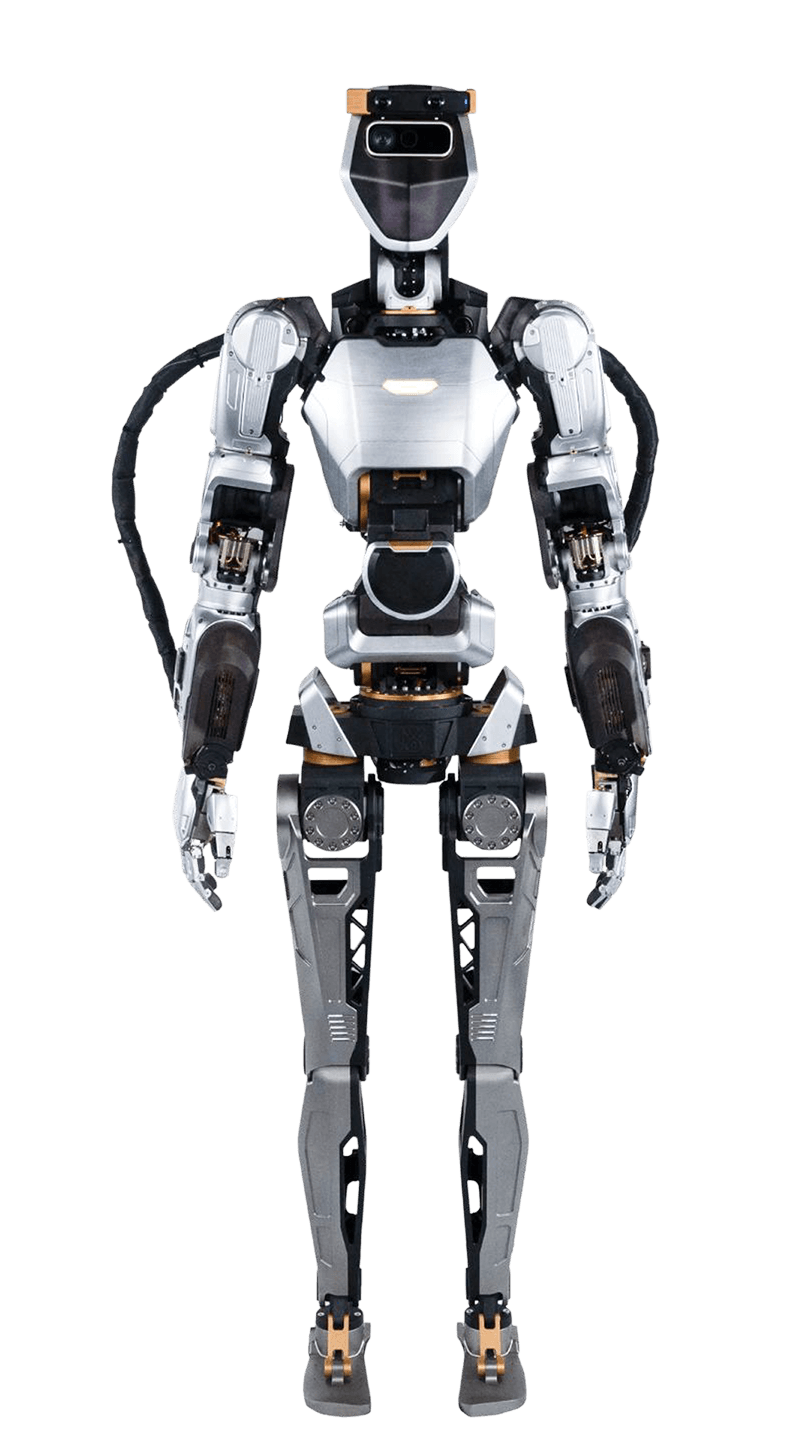
Apptronik
A next-generation humanoid robot designed for mass production, targeting logistics, manufacturing, and general-purpose tasks.

by
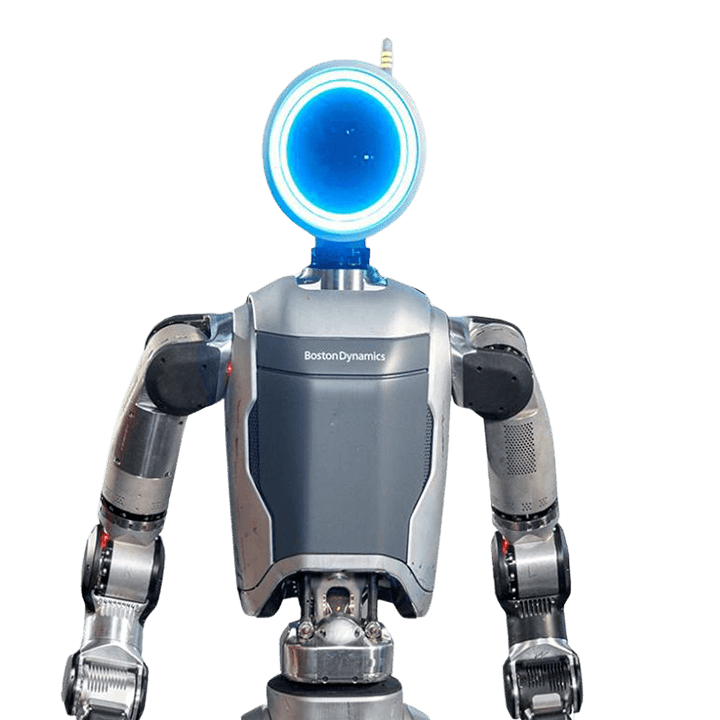
Boston Dynamics
The next-generation, all-electric version of Atlas, designed for real-world applications and commercialization.
by
Boston Dynamics
A hydraulic research humanoid known for advanced dynamic locomotion, parkour, and complex manipulation.

by
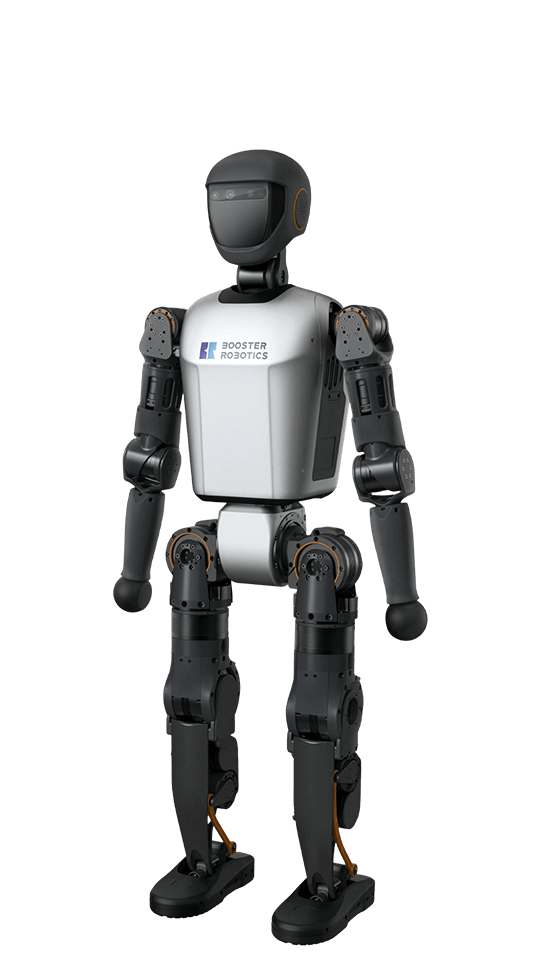
Booster Robotics
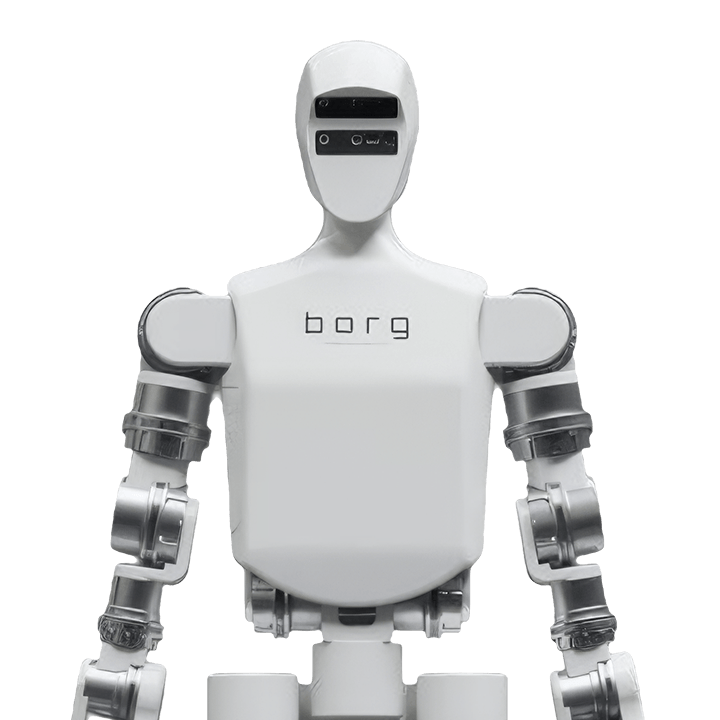
The Booster T1 is a lightweight, high-performance, open-source humanoid robot designed for developers and researchers, featuring ROS2 compatibility, advanced simulation, and AI capabilities.
by
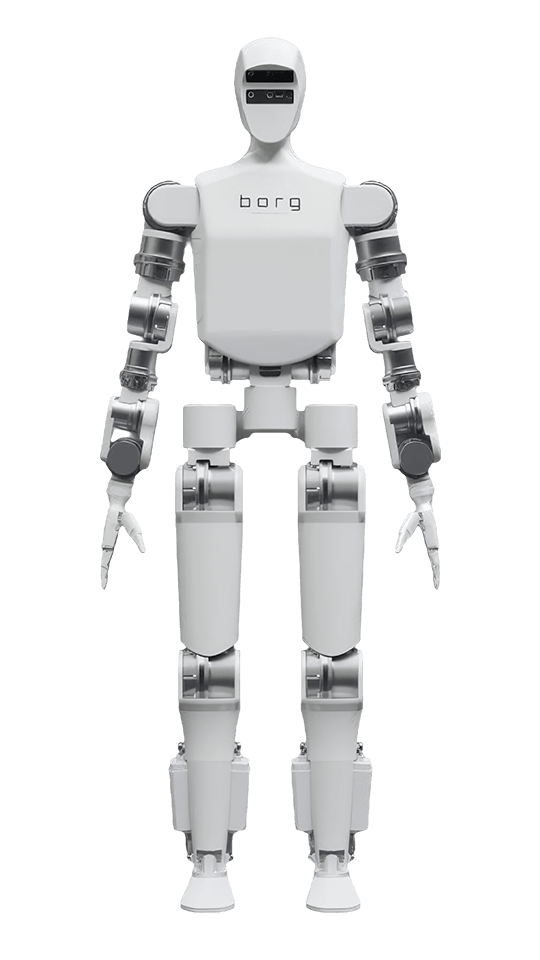
Borg Robotics
A humanoid robot designed for heavy-duty tasks in logistics and manufacturing, focusing on strength and endurance.

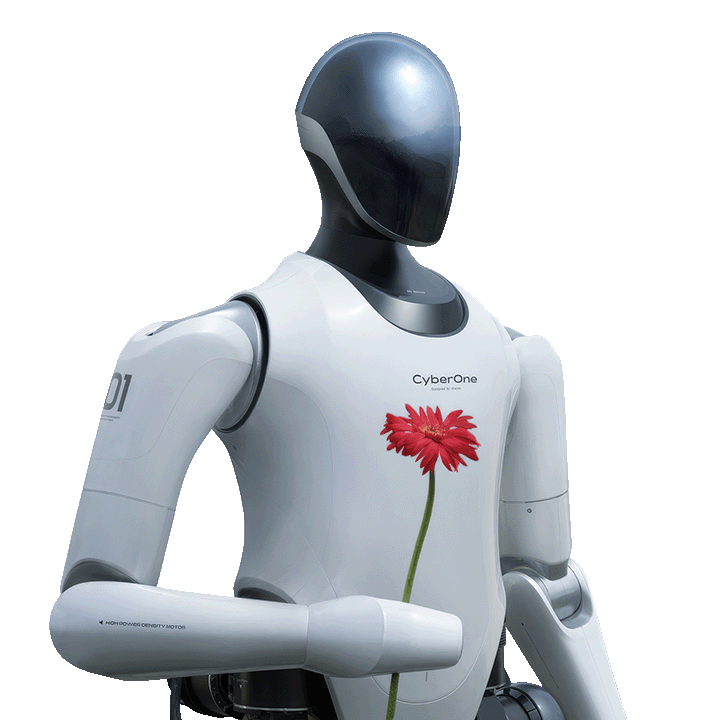
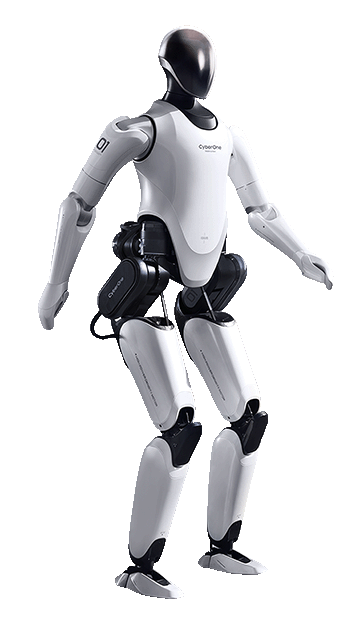
by
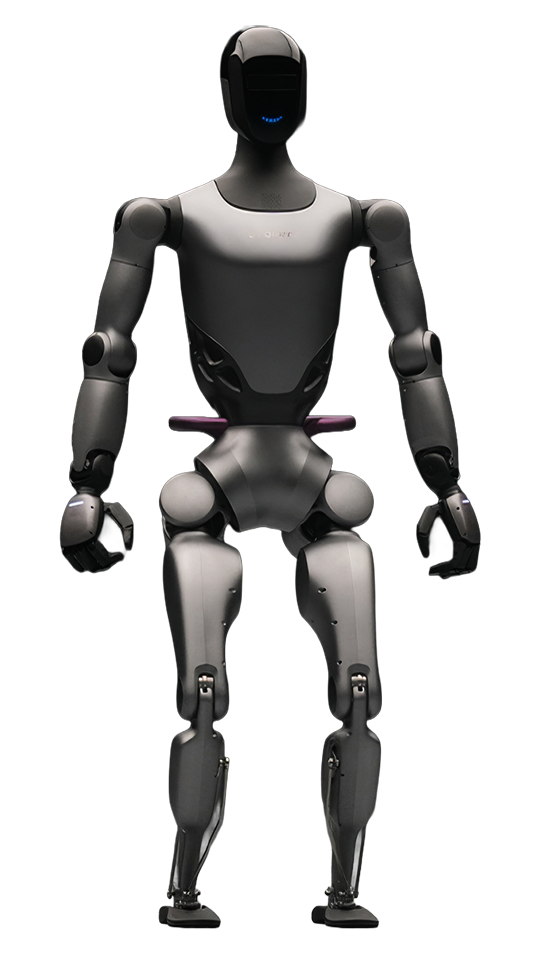
Xiaomi
A full-sized bipedal humanoid robot capable of perceiving 3D space, recognizing human emotions, and performing balance-intensive tasks.

by
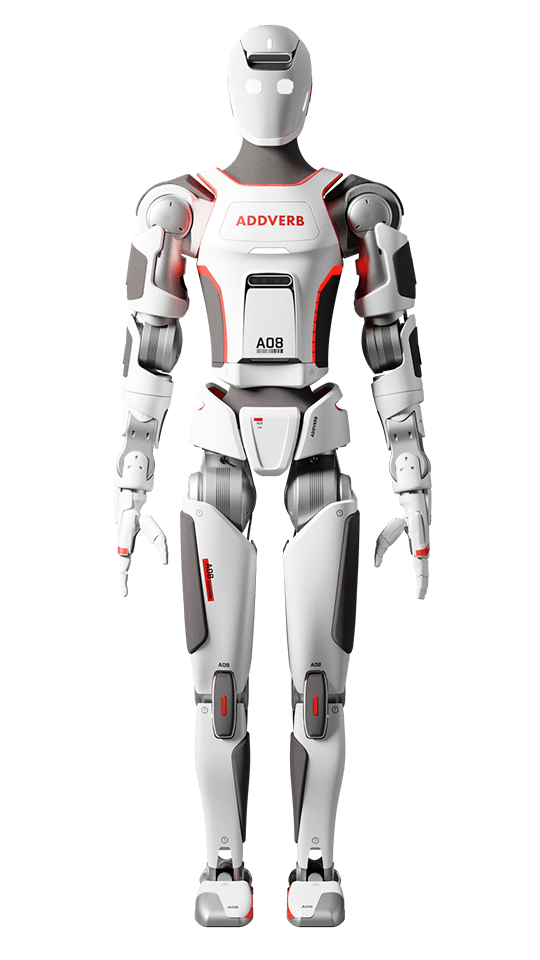
Addverb
A general-purpose bipedal humanoid with 41 DoF and VLA-enabled AI, designed for industrial and logistics applications.
by
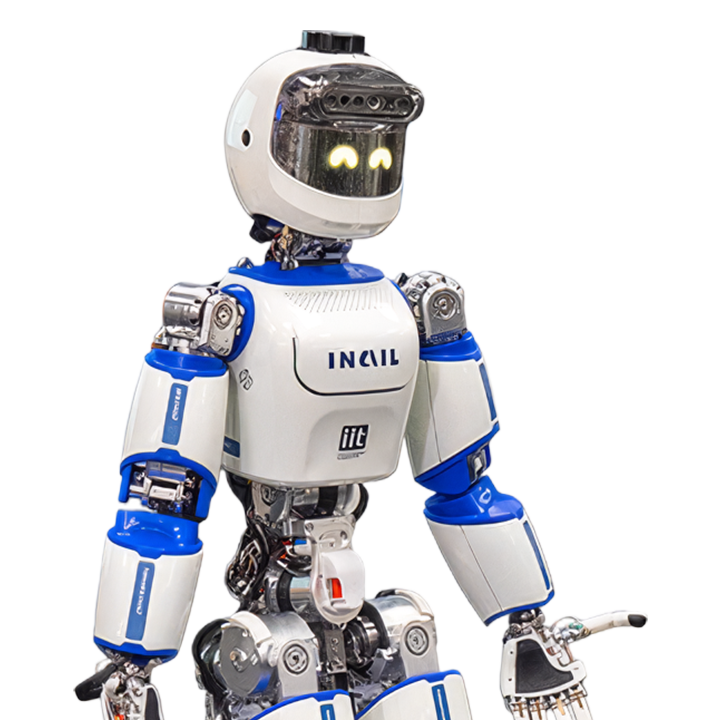
ergoCub Project
A collaborative humanoid robot research project aimed at reducing physical risk and improving ergonomics for workers in industrial settings.

by
Fourier Intelligence
A high-performance humanoid platform for developers, featuring 12-DoF dexterous hands and high-torque actuators for complex manipulation.

by
Unitree Robotics
A versatile and powerful full-sized humanoid robot known for its high-speed walking and advanced power performance in its class.

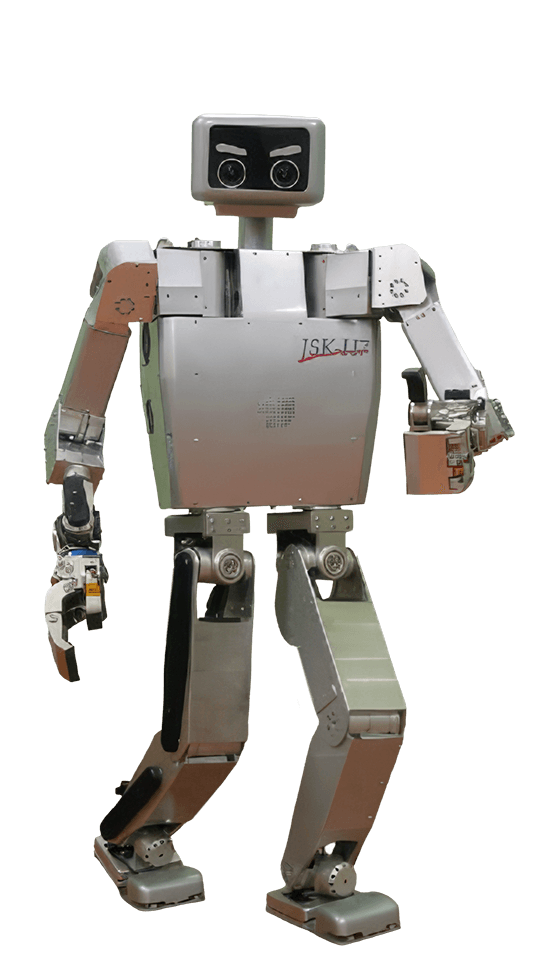
by
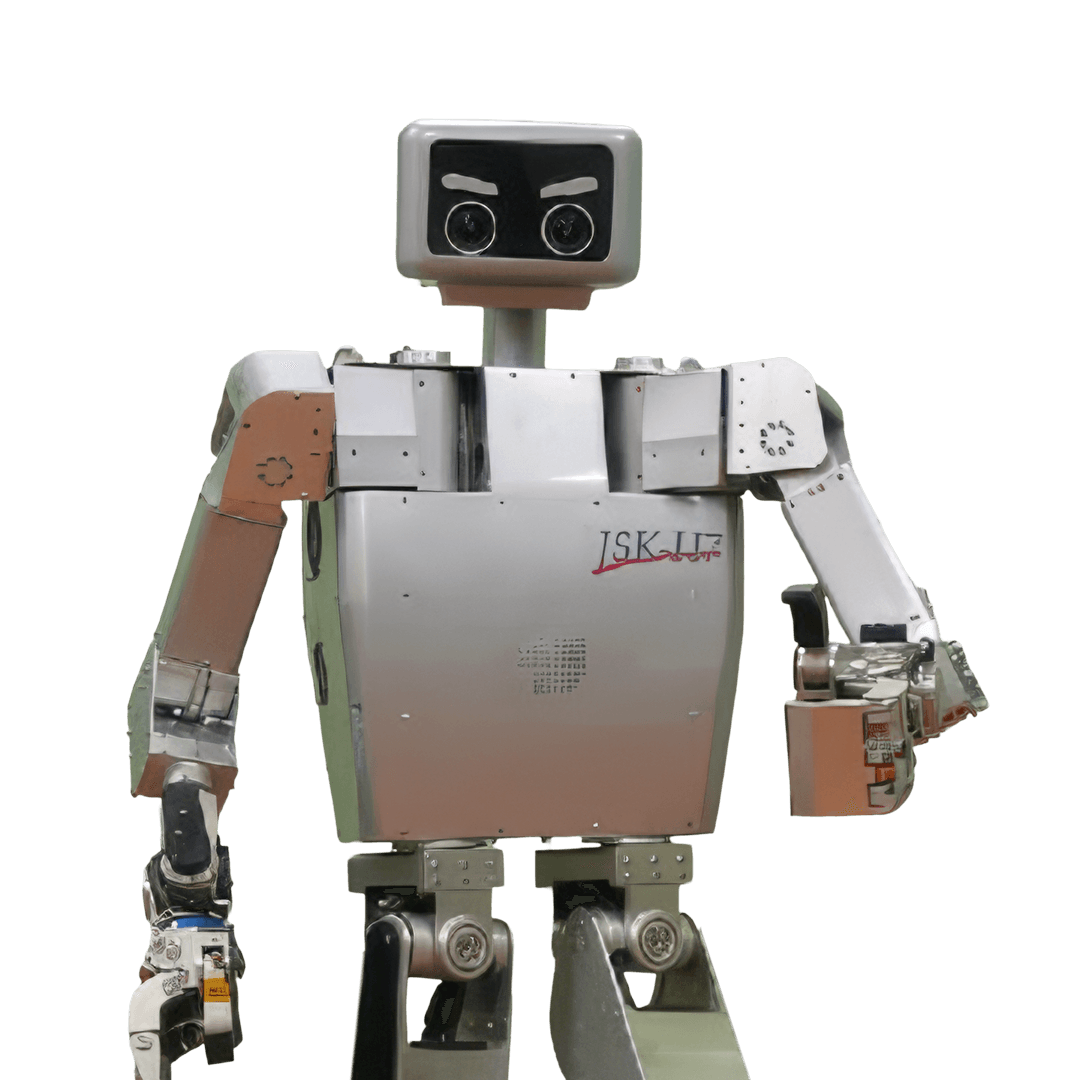
University of Tokyo
A successor to H6, this is a full-body, lightweight humanoid for research in real-world, dynamic interaction.

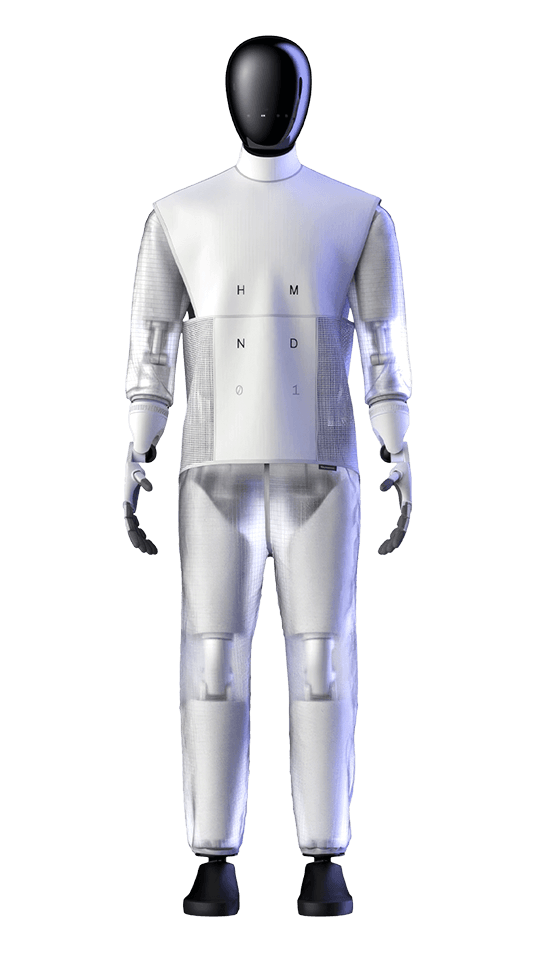
by
Humanoid
A general-purpose bipedal humanoid robot focused on AI-driven autonomous tasks in human environments.
.svg)
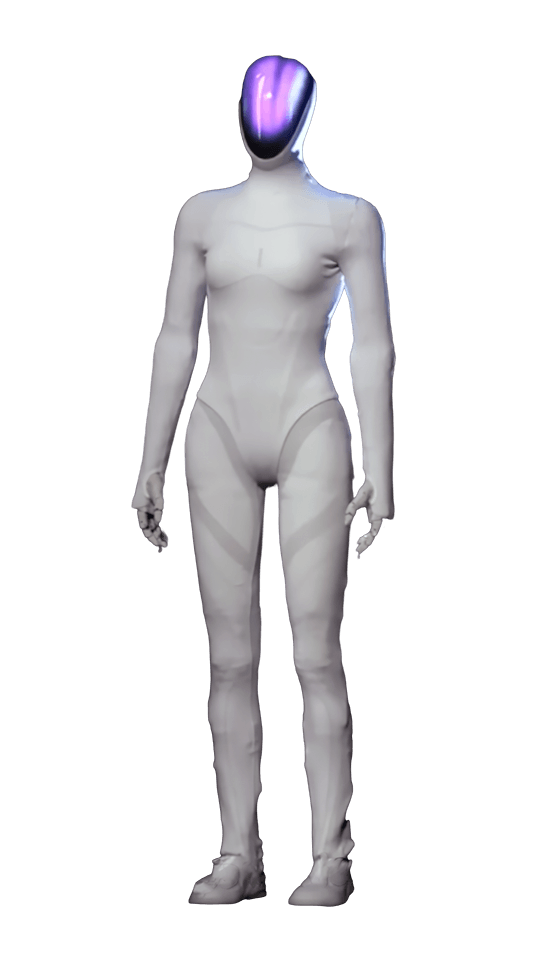
by
Nature
The original bipedal model. Extremely high maintenance, notoriously unreliable, and ships with buggy firmware. (f. ~300,000 BCE)
by
XPeng
An in-development bipedal humanoid robot designed for autonomous tasks within XPeng's manufacturing facilities.

by
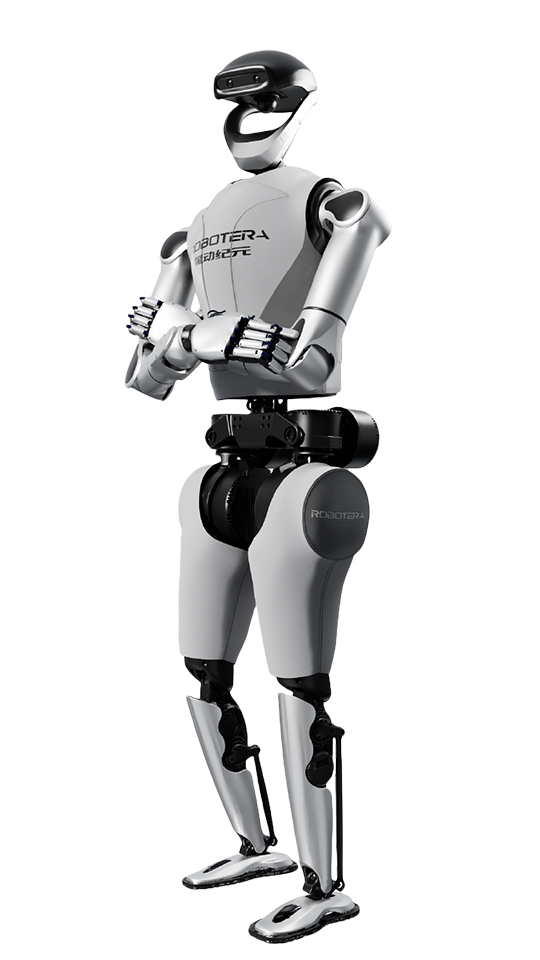
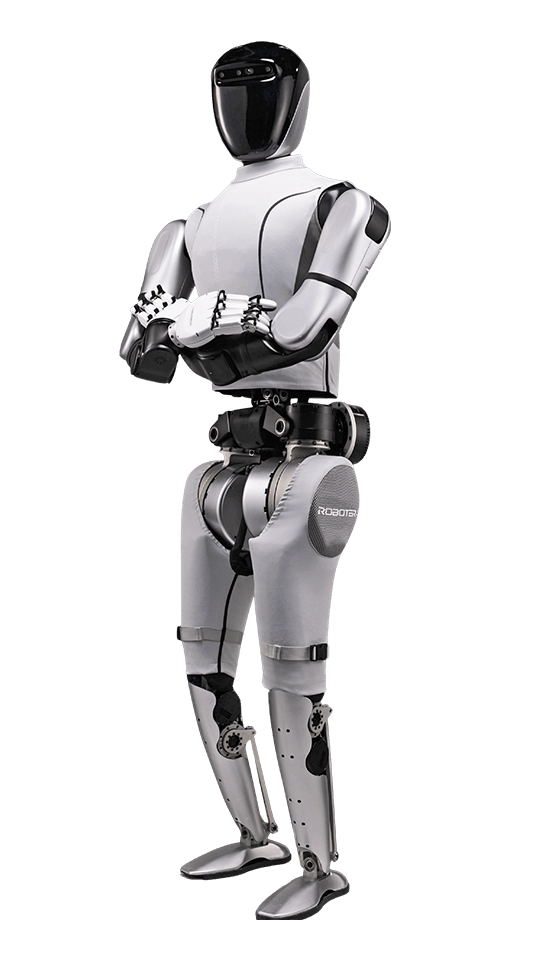
ROBOTERA
A full-size bipedal humanoid with 55 DoF and 4 m/s running speed, built for industrial automation and dynamic performance.

by
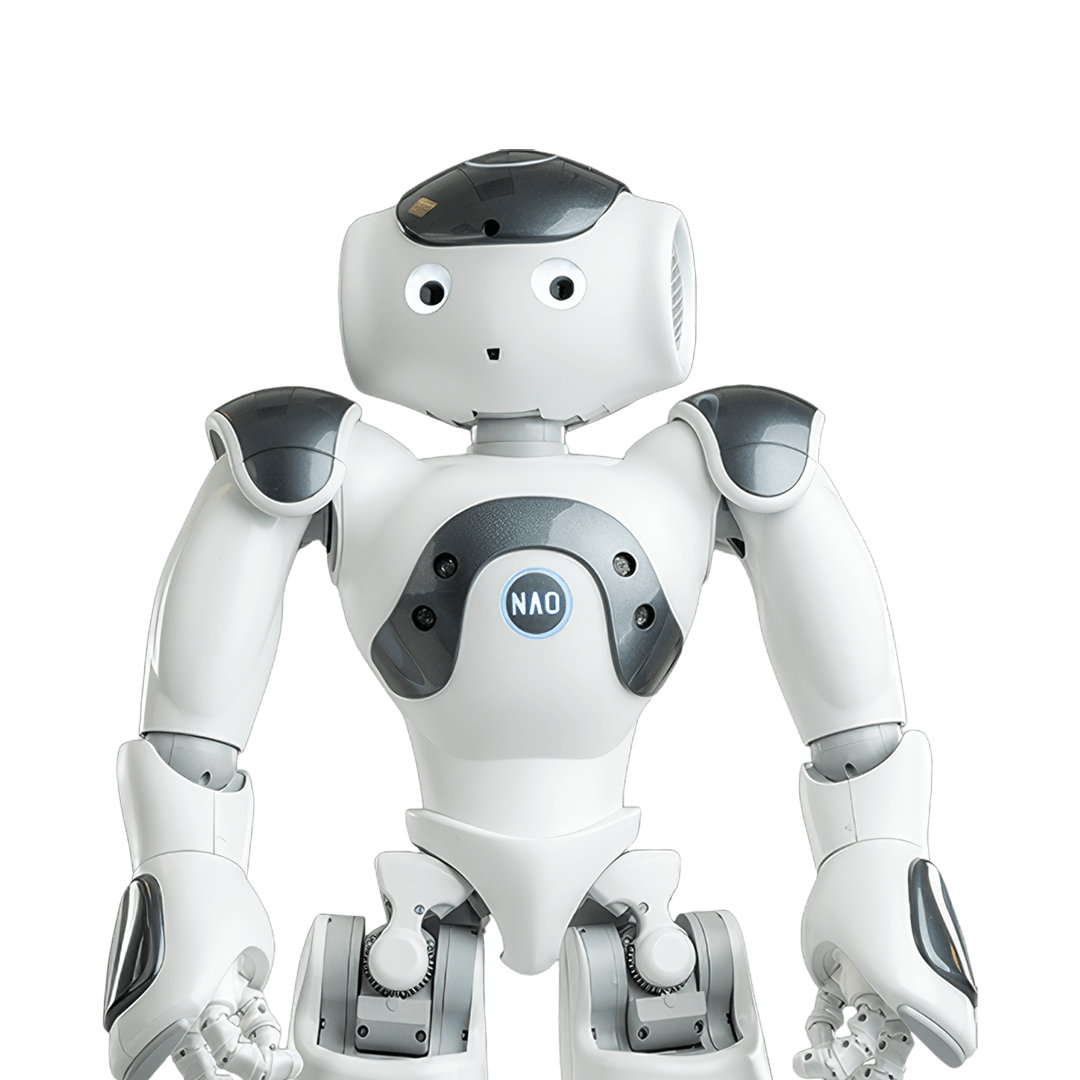
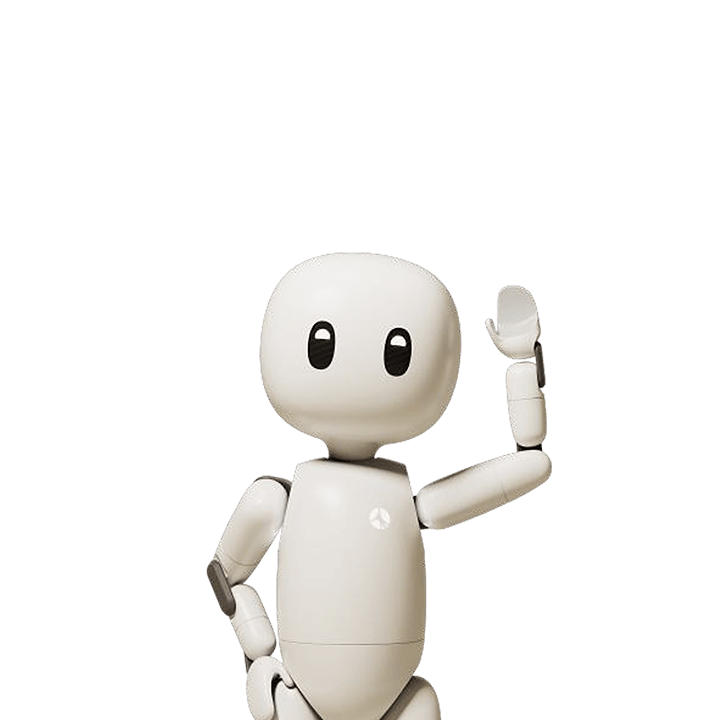
Softbank Robotics
A small, interactive, and programmable humanoid robot widely used in education, research, and healthcare.
by
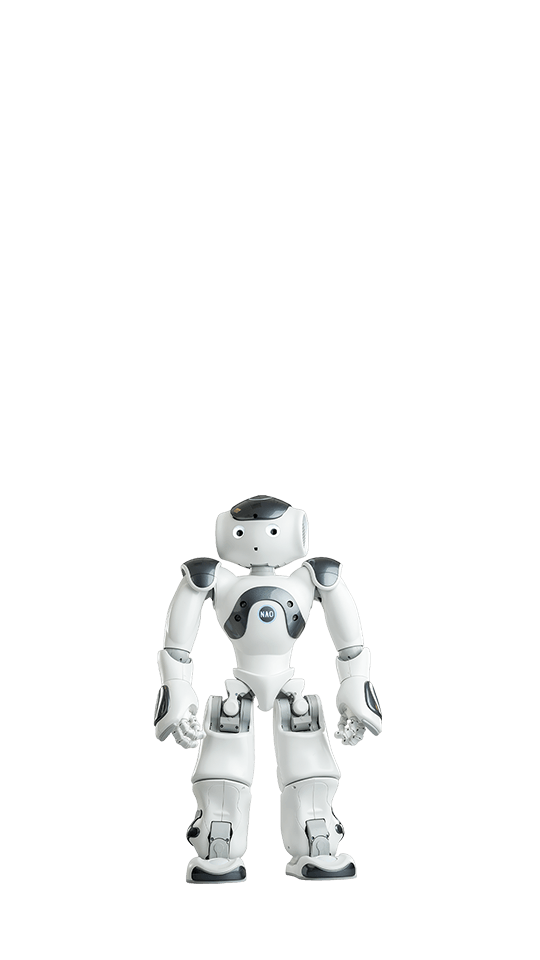
Maxtronics
A small, interactive, and programmable humanoid robot widely used in education, research, and healthcare.

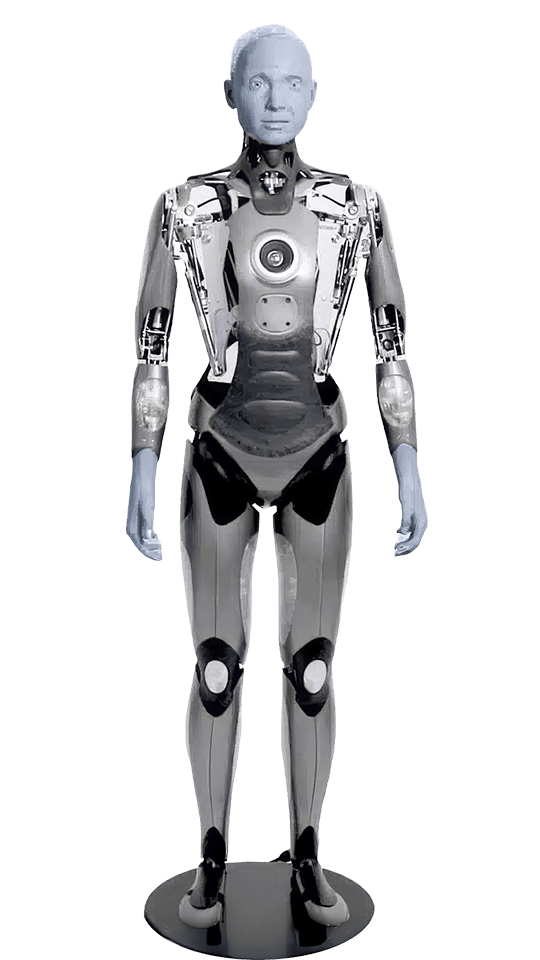
by
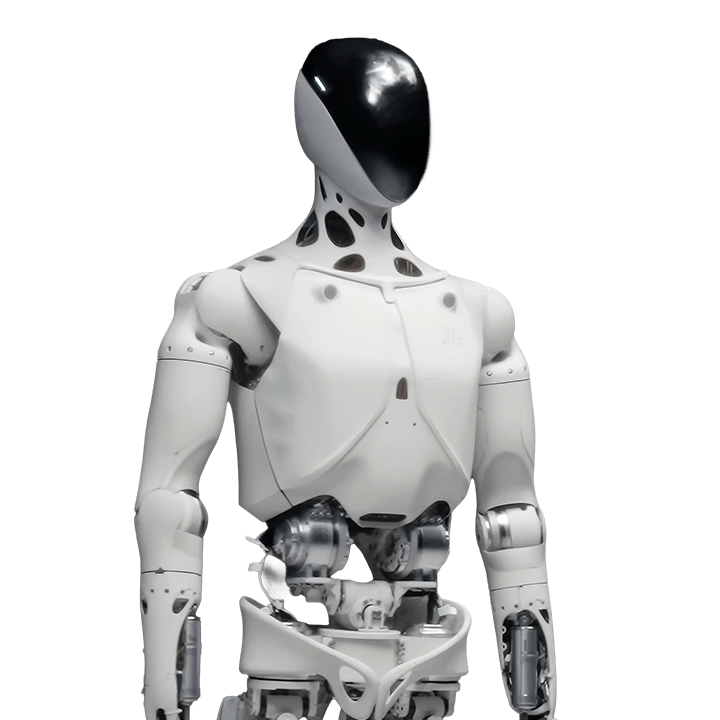
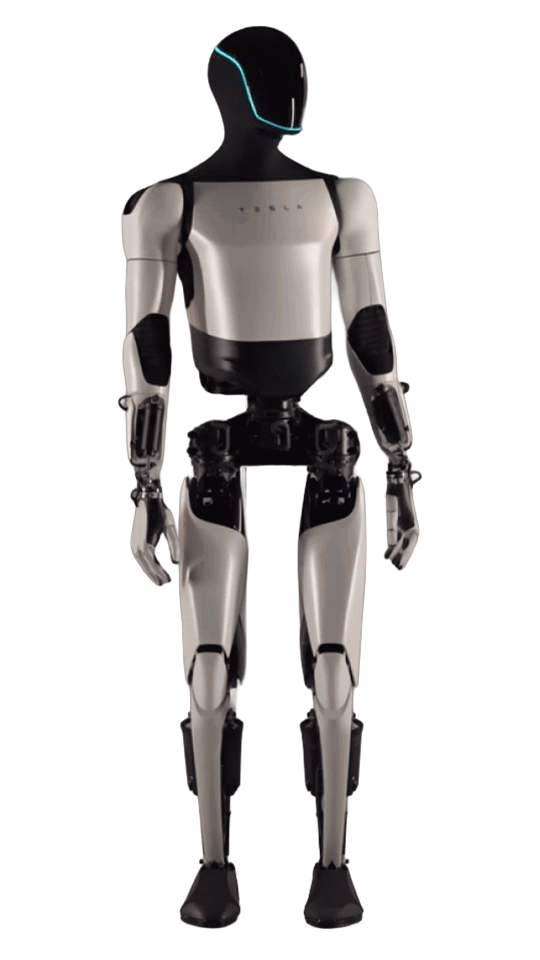
Tesla
A general-purpose, bipedal humanoid capable of performing unsafe, repetitive, or boring tasks using Tesla-designed actuators and sensors.
by
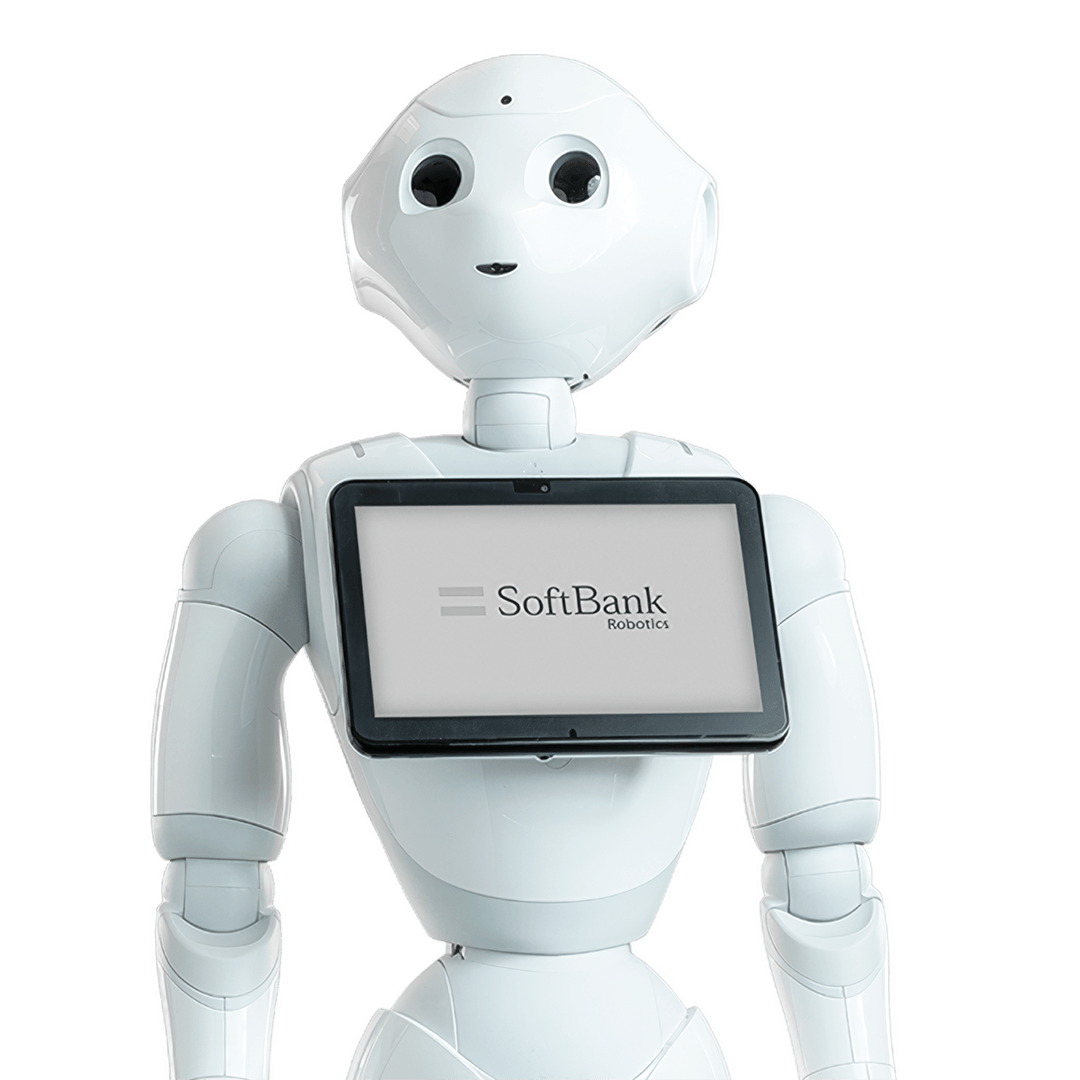
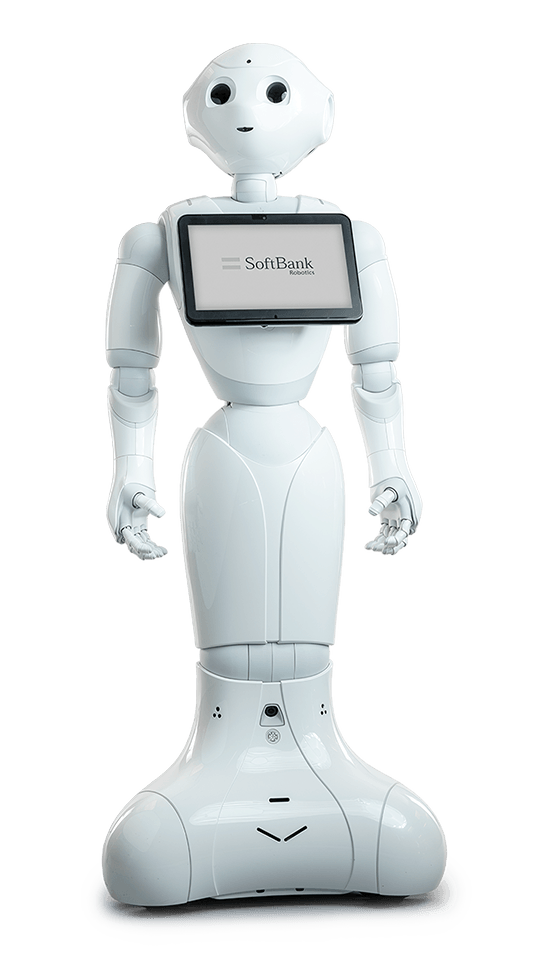
Softbank Robotics
A human-sized, wheeled robot designed for social interaction, widely used in retail and hospitality.

by
Sanctuary AI
A general-purpose, carbon-fiber humanoid robot designed for autonomous work, powered by the 'Carbon' AI control system.
by
Unitree Robotics
A compact, all-electric humanoid robot designed for agile locomotion, low-cost embodied AI research, and rapid iteration.

by
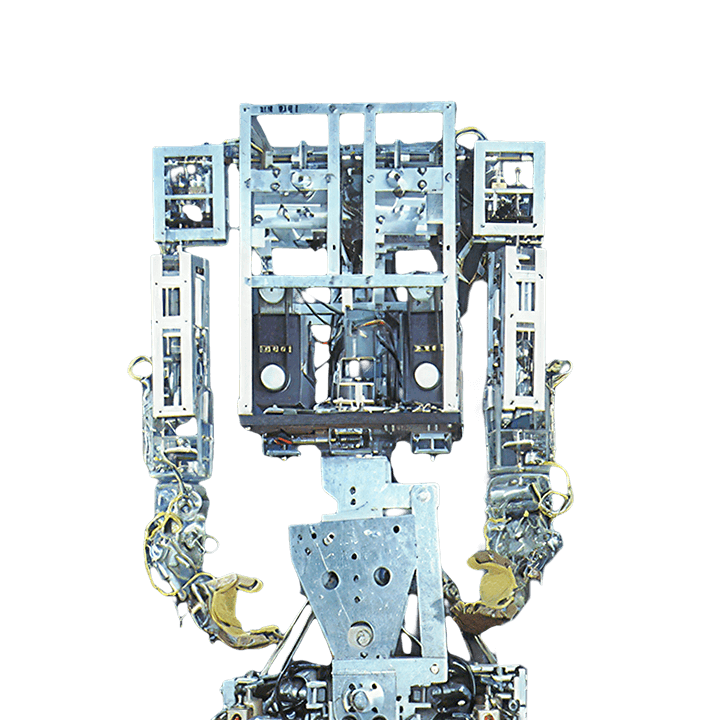
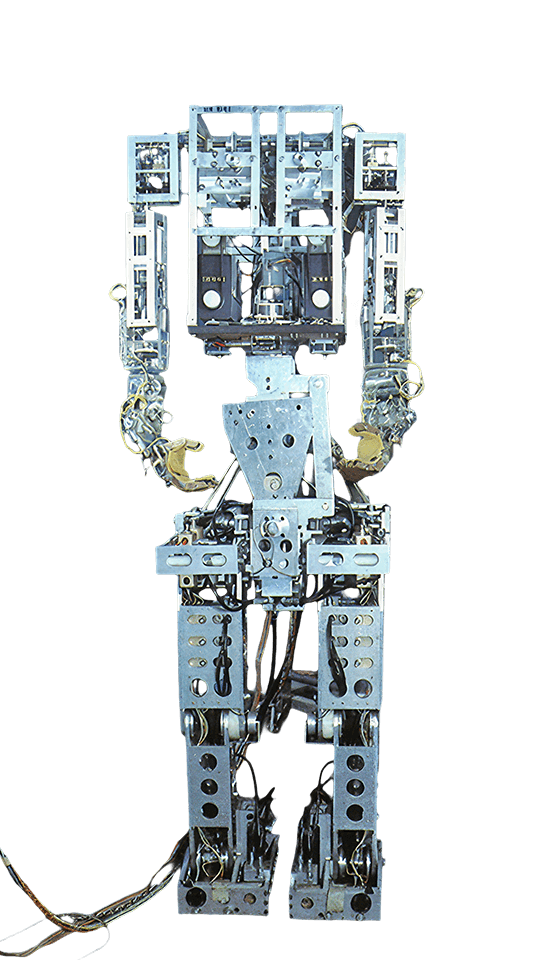
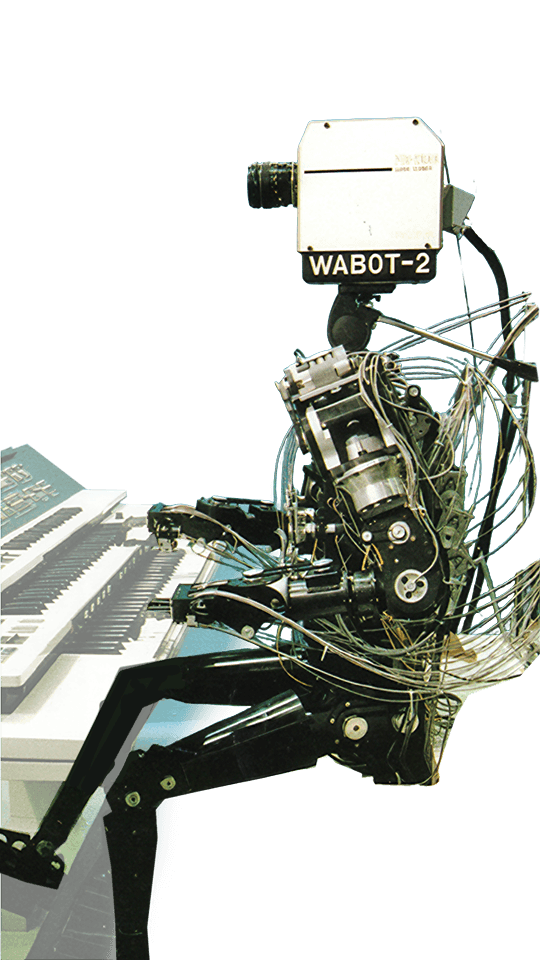
Waseda University
Developed in 1973, it was the world's first full-scale anthropomorphic robot, able to walk and communicate.
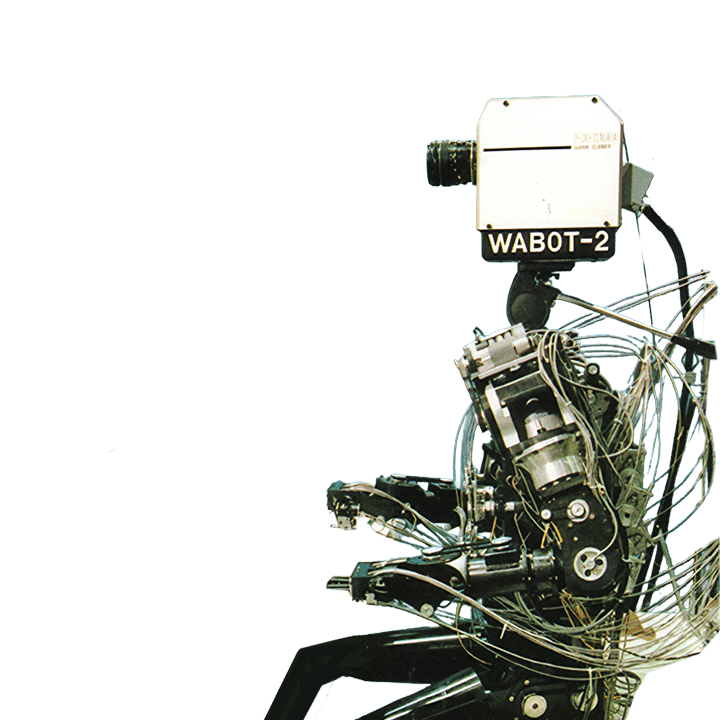
by
Waseda University
An anthropomorphic robot developed in the 1980s, specializing in playing musical instruments.

by
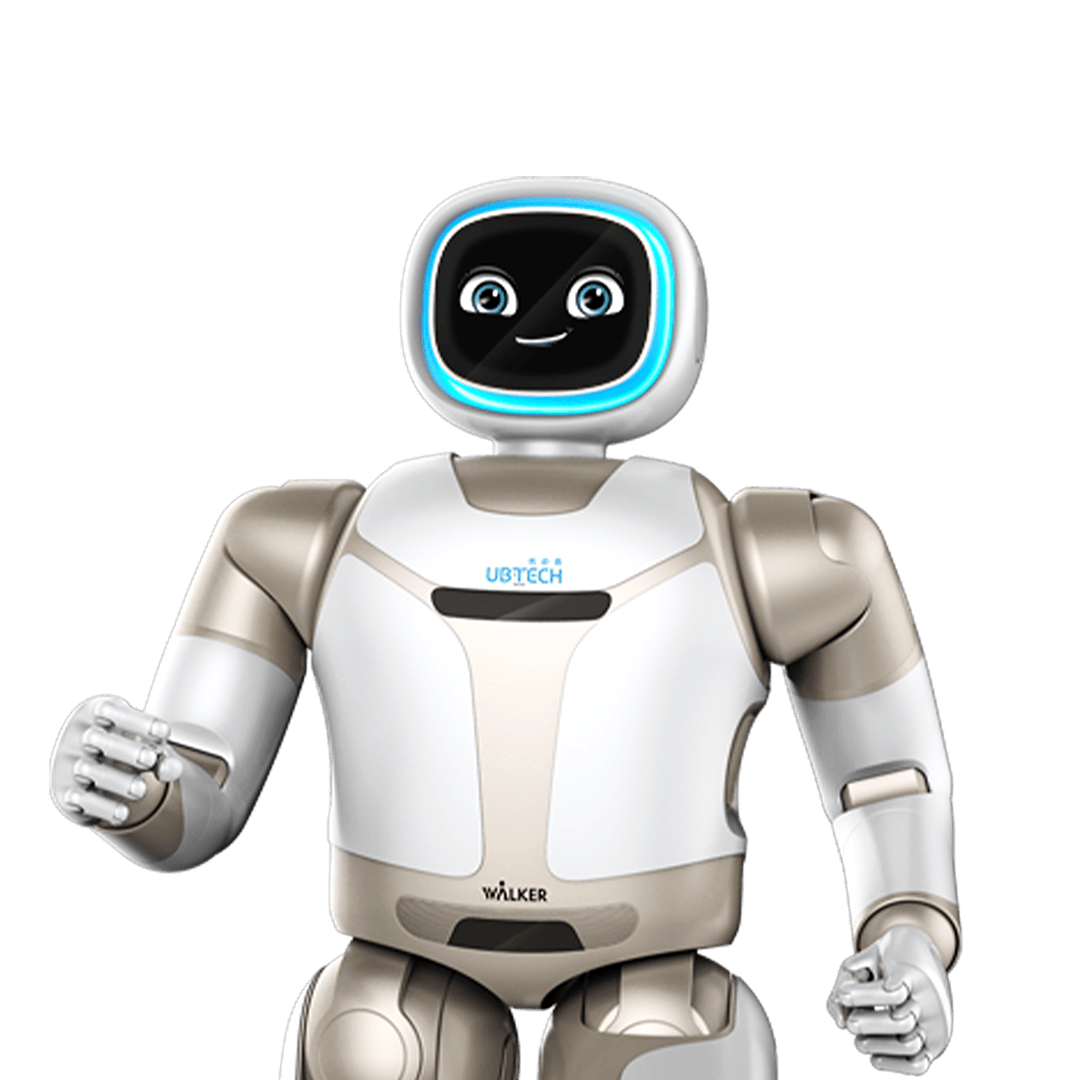
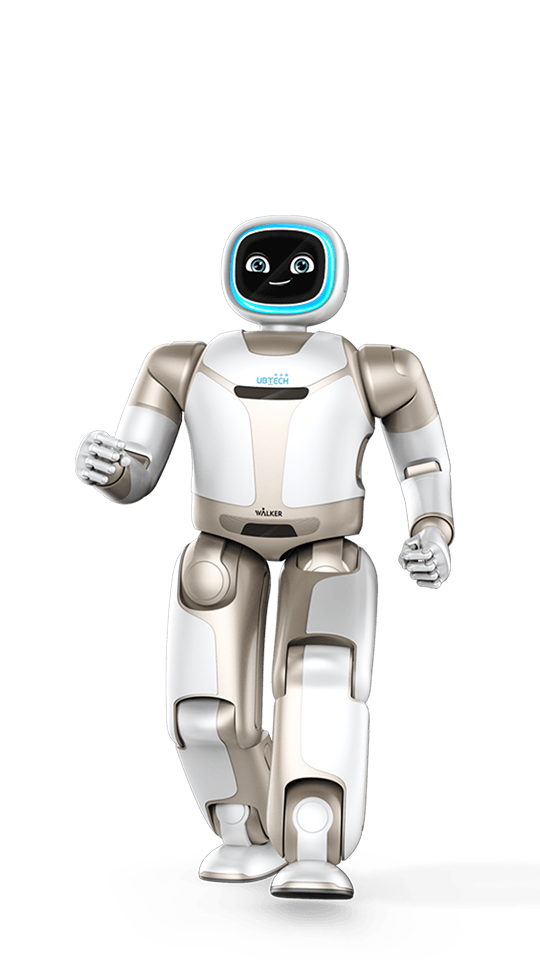
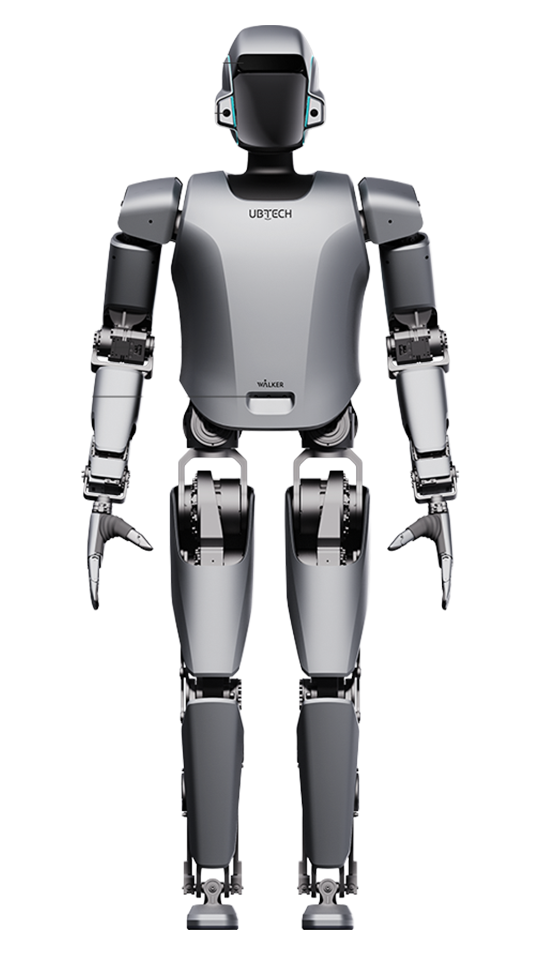
UBTECH Robotics
A full-sized bipedal humanoid robot designed for service and assistance in home and commercial settings.
by
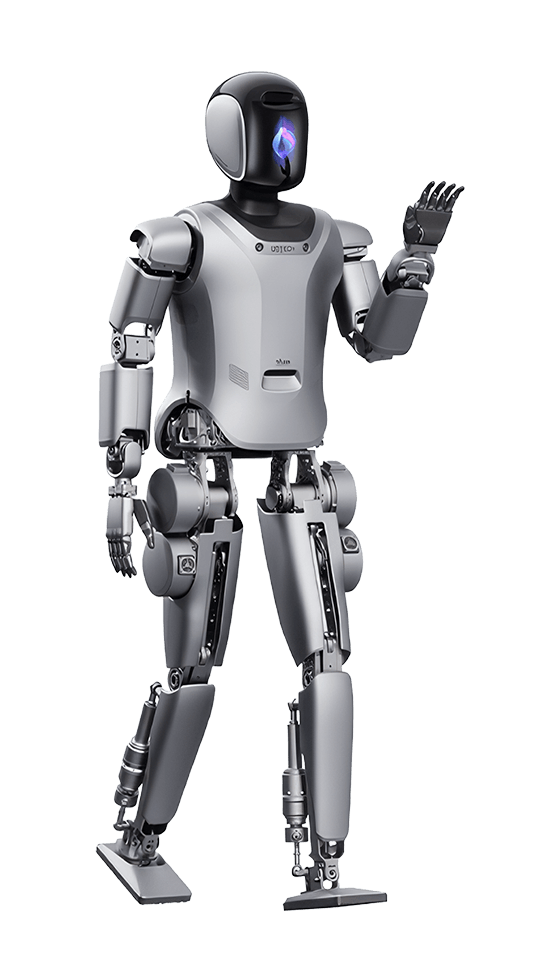
UBTECH Robotics
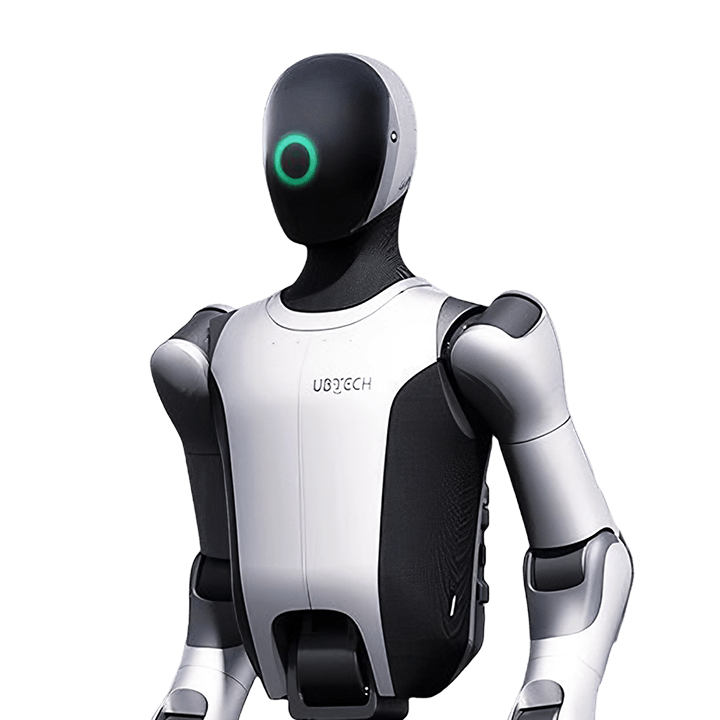
An industrial humanoid robot integrated with Large Language Models, specifically designed for assembly line tasks and manufacturing automation.
by
UBTECH Robotics
An upgraded industrial version of the Walker series with enhanced payload capacity and stable locomotion for mobile production lines.
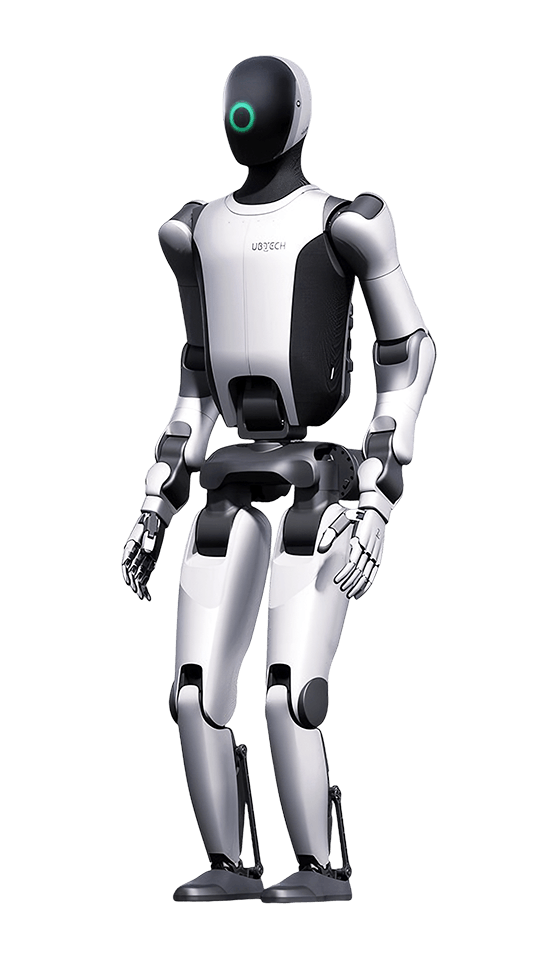
by
UBTECH Robotics
An upgraded, industrial-focused version of Walker, designed for tasks in manufacturing and logistics.

by
Cartwheel
A social humanoid robot designed for companionship and hospitality interaction, with expressive movement capabilities.