Image:
Stanford Robotics Lab
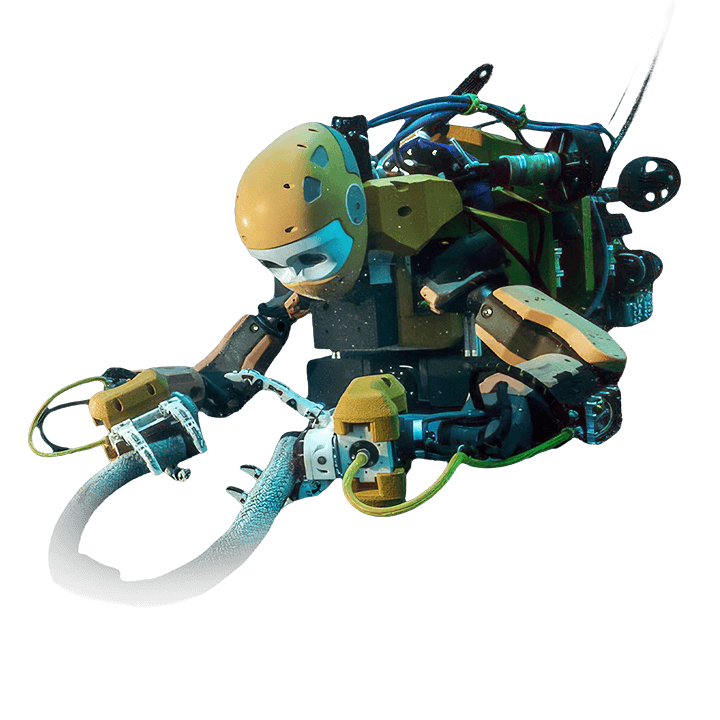
A "humanoid diver" robot designed for underwater exploration and teleoperated manipulation in deep-sea environments.

Height
150
cm

Weight
180
kg

Speed
1.0
m/s

Payload
N/A

Mobility
Thruster, Subnautical

Actuators
Electric Thruster

DoF (Domains of freedom)
28
°

OceanOne acts as your personal avatar under the sea, allowing you to explore dangerous depths while staying safely on the surface.
Its human-like hands are gentle enough to recover fragile 17th-century vases from shipwrecks without leaving a single scratch.
Thanks to advanced haptic feedback, you can actually feel the resistance and texture of artifacts as if you were touching them yourself.
Even in shifting underwater currents, the robot’s thrusters and sensors keep its hands perfectly steady so you can focus on the task.
A "humanoid diver" robot designed for underwater exploration and teleoperated manipulation in deep-sea environments.
OceanOne is a unique underwater humanoid designed for "haptic telepresence" in environments unreachable by divers. With its 7-DOF compliant arms and force-feedback sensors, a human pilot can "feel" the weight and texture of artifacts from a safe distance. Its neutrally buoyant body and eight-thruster propulsion system allow it to hover with incredible stability, bridging the gap between a remotely operated vehicle and a skilled human archaeologist.
Image:
Stanford Robotics Lab
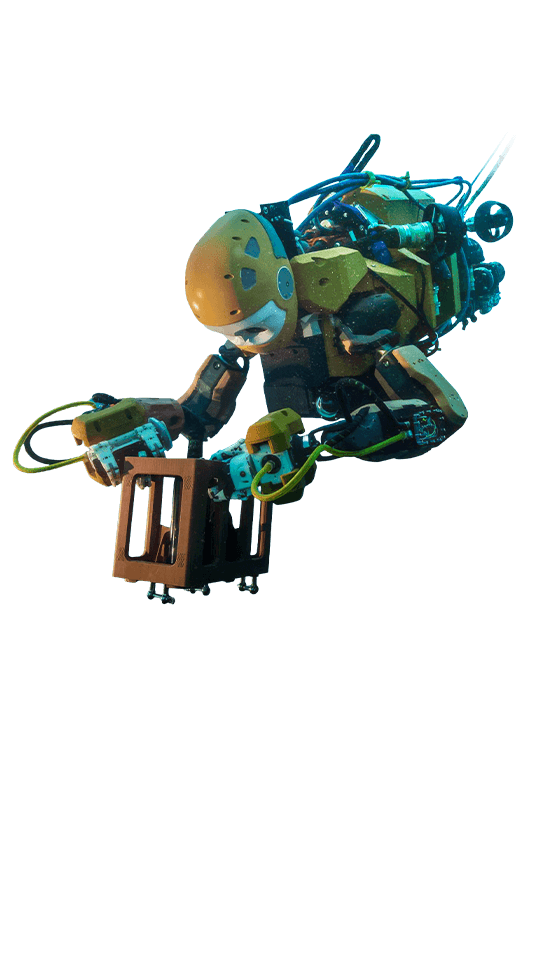
A haptic-enabled underwater humanoid that allows scientists to "feel" what the robot touches at depths unreachable by human divers.
OceanOne by Stanford Robotics Lab
Actuators
Electric Thruster
DoF (Domains of freedom)
28
°
Height
150
cm
Speed
1.0
m/s
Weight
180
kg
Payload
N/A
kg
Runtime
N/A
h
OS / AI System
N/A
Thruster, Subnautical
N/A
Features a proprietary haptic feedback system that allows pilots to "feel" underwater objects as if they were touching them directly, even at depths of 1,000 meters.
Utilizes an eight-thruster propulsion system and neutrally buoyant limbs, allowing for stable, "hover-and-grip" operations in delicate archaeological or oil-rig sites.
Image:
Stanford Robotics Lab
French Ministry of Culture (DRASSM) and Stanford University’s archaeological teams.
Deep-sea exploration, underwater archaeology, and offshore oil/gas infrastructure maintenance.
Mimics a diver's torso and arms for natural telepresence.
Capable of precise manipulation resembling a human diver.
Allows operators to feel underwater forces as if using their own hands.




by
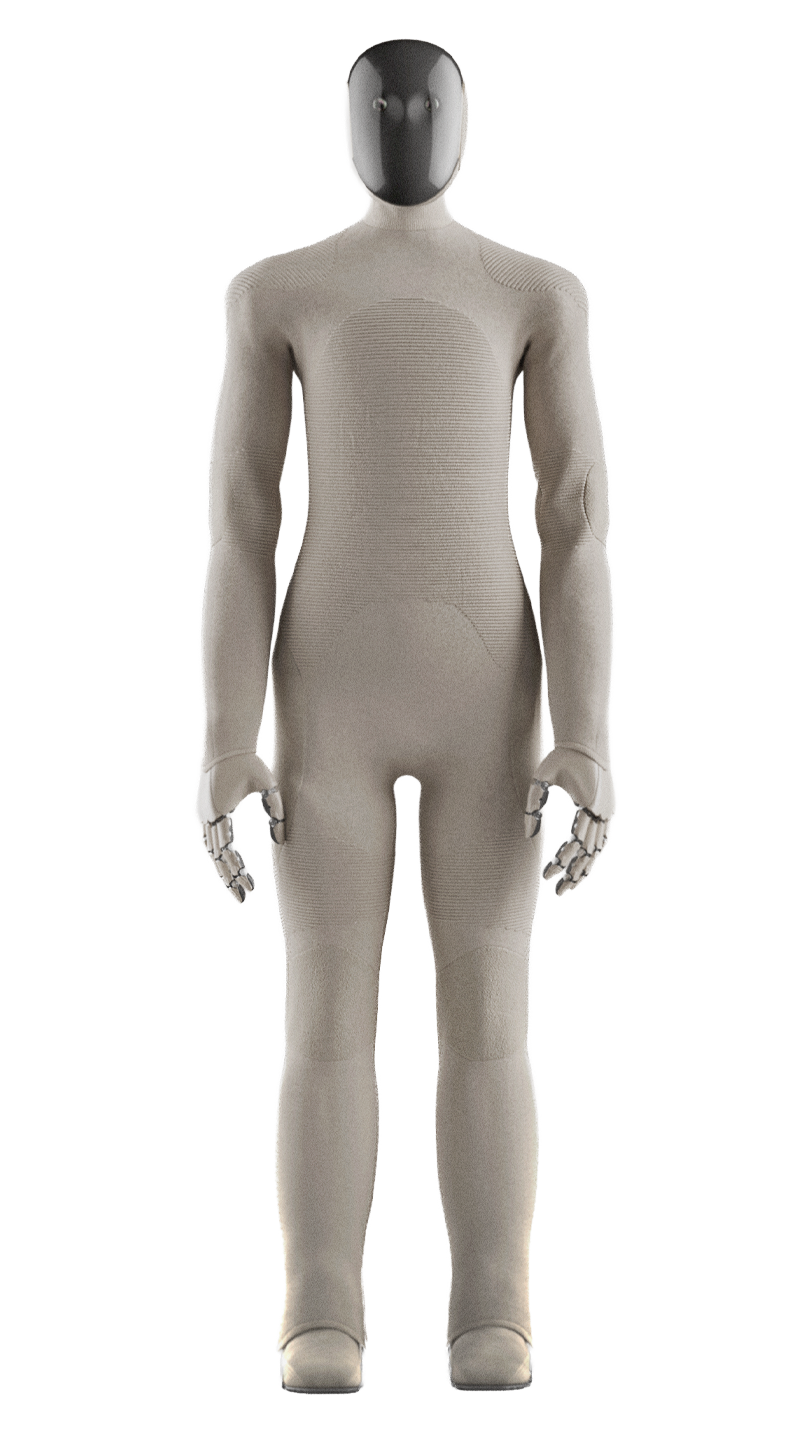
1X Technologies
The next-generation domestic humanoid featuring a muscle-like soft body design and advanced visual manipulation for household tasks.

by
Tesla
Designed for high-risk and repetitive roles, Tesla’s Optimus bot aims to redefine the global workforce through advanced humanoid robotics.

by
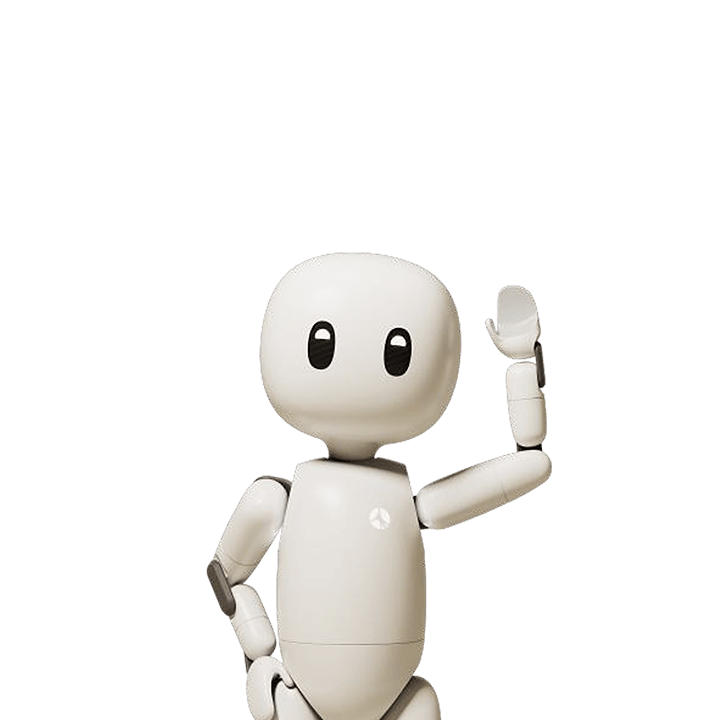
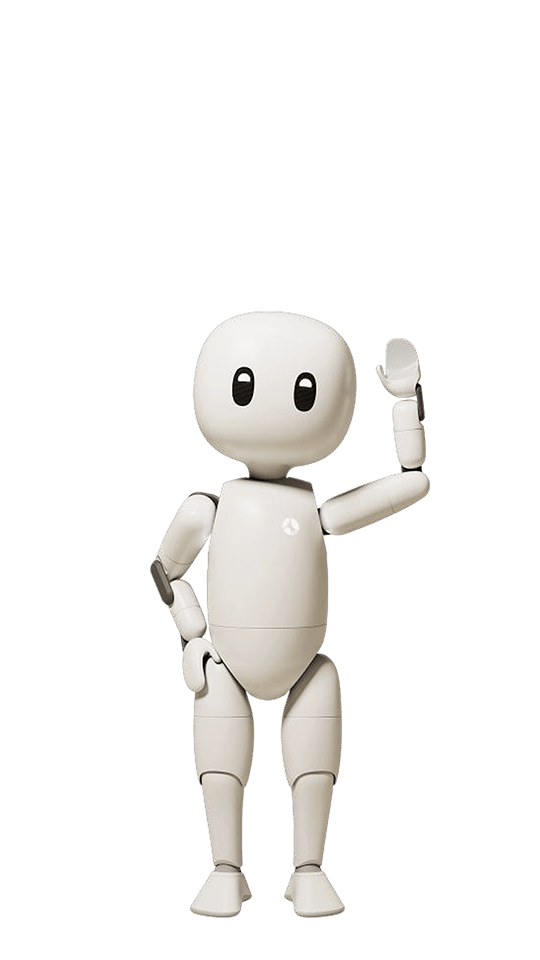
Cartwheel
A social humanoid robot designed for companionship and hospitality interaction, with expressive movement capabilities.
by
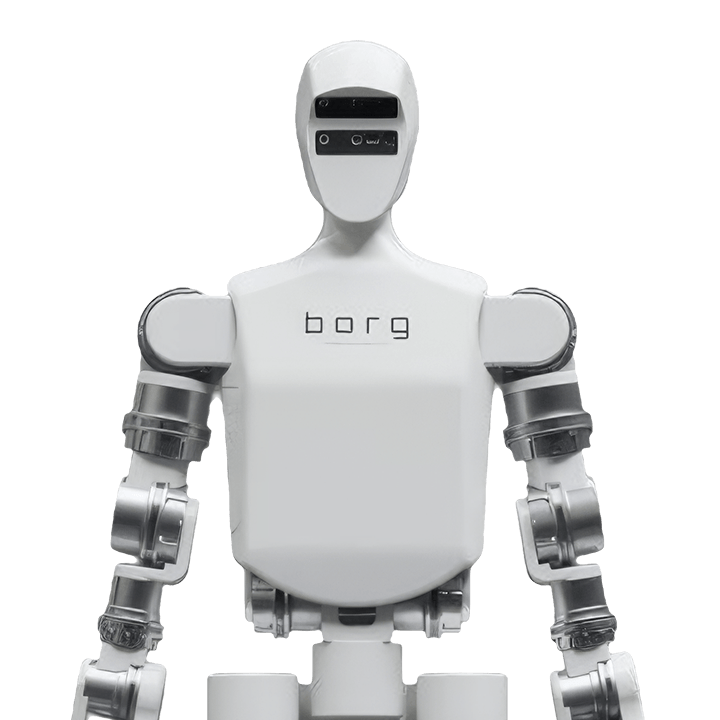
Borg Robotics
A humanoid robot designed for heavy-duty tasks in logistics and manufacturing, focusing on strength and endurance.