Image:
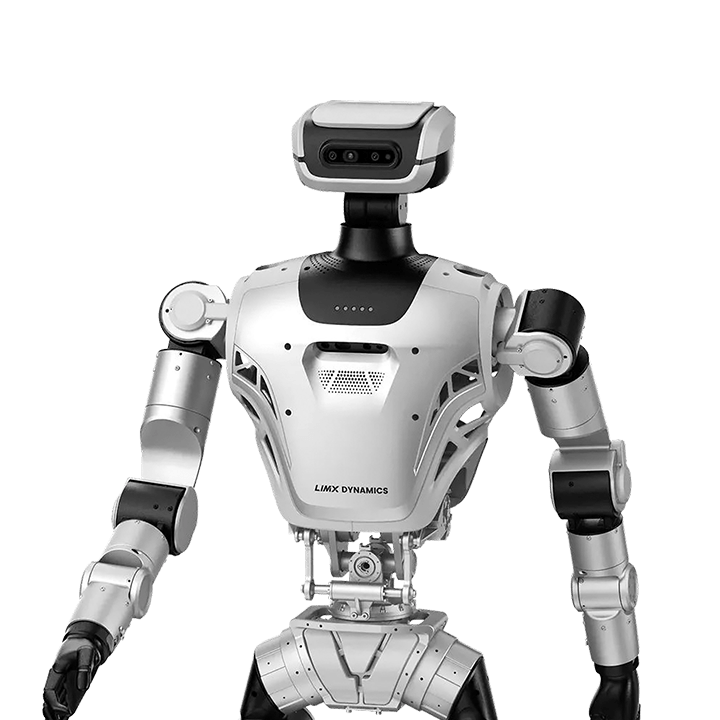
LIMX Dynamics
A bipedal robot focused on high-dynamic mobility and terrain adaptation, designed for R&D and future service applications.

LimX Motion Control

Height
120
cm

Weight
35
kg

Speed
2.0
m/s

Payload
N/A

Actuators
High-speed motors

DoF (Domains of freedom)
N/A
°

Instant balance recovery from trips or pushes.
Real-time gait adaptation for unpredictable outdoor paths.
Walks over snow, grass, and curbs with human ease.
Built to withstand aggressive, high-speed movement cycles.
A bipedal robot focused on high-dynamic mobility and terrain adaptation, designed for R&D and future service applications.
Standing 165 cm, Oli is available in Lite, EDU, and Super models. It features up to 43 DoF and is optimized for Reinforcement Learning research with a 150 Nm peak torque joint system.
Image:
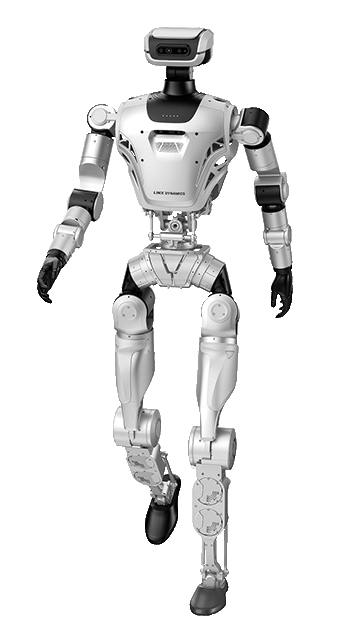
LIMX Dynamics
Oli is built for developers to master Sim2Real transitions. It offers open SDKs and a high-performance gait library, allowing for athletic bipedalism across snow, gravel, and uneven terrain.
Oli by LIMX Dynamics
Actuators
High-speed motors
DoF (Domains of freedom)
N/A
°
Height
120
cm
Speed
2.0
m/s
Weight
35
kg
Payload
N/A
kg
Runtime
N/A
h
OS / AI System
LimX Motion Control
A modular software development kit supporting Python and ROS 2, providing both high-level task planning and low-level torque control for advanced AI research.
Image:
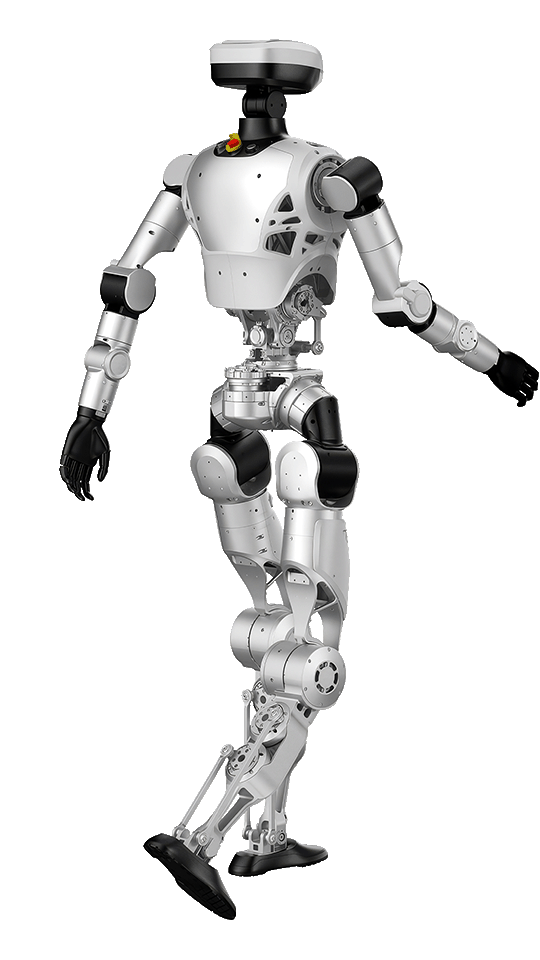
LIMX Dynamics
Oli is offered in Lite, EDU, and Super configurations to universities and AI startups globally. It is a primary choice for labs specializing in reinforcement learning and high-dynamic bipedal locomotion experiments.
Oli utilizes reinforcement learning for motion control, a significant advance over traditional model-based gaits. It allows the robot to adapt to unpredictable outdoor terrains like snow and gravel with instant balance recovery and human-like reflexes.
Focuses on the human-like ability to recover from trips or pushes using rapid bipedal steps.
Emphasizes lower-body humanity, prioritizing the "legs-first" approach to navigating human environments.
Mimics natural human navigation over curbs, grass, and slopes without halting or losing posture.



by
SwitchBot
A multitask household humanoid robot utilizing VLA models for complex chores like laundry and dishwashing in real home environments.
by
LIMX Dynamics
A bipedal robot focused on high-dynamic mobility and terrain adaptation, designed for R&D and future service applications.

by
Unitree Robotics
A high-performance general-purpose humanoid robot standing 1.8m tall, featuring 360-degree depth perception.

by
UBTECH Robotics
An industrial humanoid robot integrated with Large Language Models, specifically designed for assembly line tasks and manufacturing automation.