Image:
KAIST & Hanson Robotics
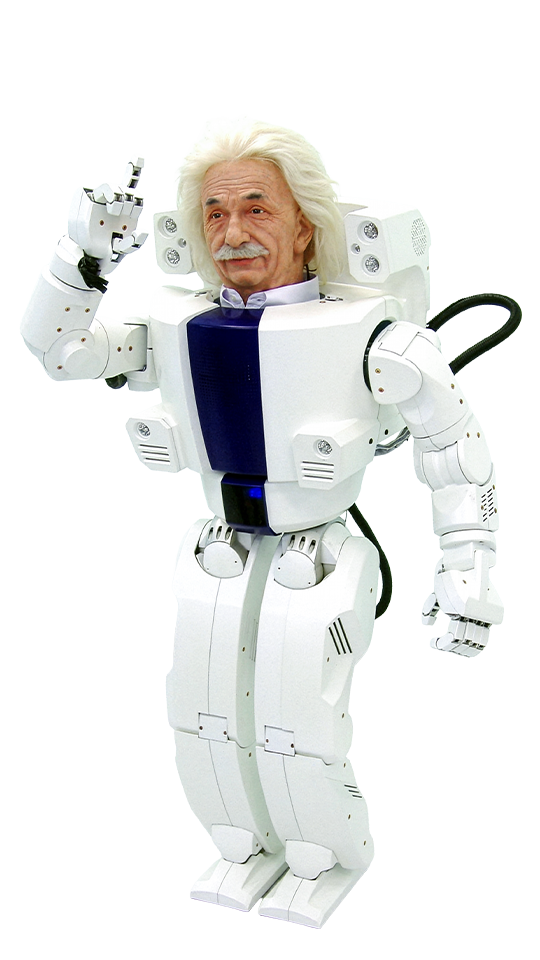
Albert HUBO (2005) was the world’s first android with a head mounted on a life-size walking robotic frame and the world’s first walking humanoid robot.



Height
137
cm

Weight
57
kg

Speed
0.35
m/s

Payload
N/A

Actuators
Electric Servo

DoF (Domains of freedom)
66
°

Features a lifelike Frubber skin head modeled after Albert Einstein.
The historic winner of the DARPA Robotics Challenge for disaster response.
Showcases KAIST’s advanced bipedal walking algorithms for stable movement.
Combines a highly technical body with a face designed for human empathy.
Albert HUBO (2005) was the world’s first android with a head mounted on a life-size walking robotic frame and the world’s first walking humanoid robot.
A collaboration between KAIST and Hanson Robotics, Albert Hubo combines the advanced bipedal walking of the Hubo platform with the expressive Frubber face of Albert Einstein. It can walk at 1.5 km/h and perform complex gestures while maintaining a high level of social engagement through 60+ facial expressions, serving as a landmark in the study of humanoid social presence.
Image:
KAIST & Hanson Robotics
Combines world-class bipedal stability with a hyper-realistic "Frubber" face, serving as a landmark research platform for social AI and emotionally resonant human-robot interaction.
Albert HUBO by KAIST & Hanson Robotics
Actuators
Electric Servo
DoF (Domains of freedom)
66
°
Height
137
cm
Speed
0.35
m/s
Weight
57
kg
Payload
N/A
kg
Runtime
N/A
h
OS / AI System
Features Frubber (flesh-rubber) skin technology and 28 dedicated facial actuators to replicate complex human emotions with extremely low power consumption (10W).
Built on the KAIST HUBO KHR-3 platform, utilizing robust bipedal walking algorithms and a self-stabilizing internal control loop for reliable social presence.
Image:
KAIST & Hanson Robotics
Primarily used by KAIST, research universities, and science museums worldwide.
Social robotics researchers, public edutainment, and human-robot interaction (HRI) labs.
Evolved from the HUBO 2 (KHR-3) platform, this model integrates the iconic "Einstein" face with improved facial actuators and a more stable bipedal gait. It bridges the gap between the purely mechanical HUBO research bots and the need for emotionally resonant, lifelike social interaction.
Realistic face capable of rich expression.
Makes humanoid robotics relatable to the public.
Combines expressive head with walking.



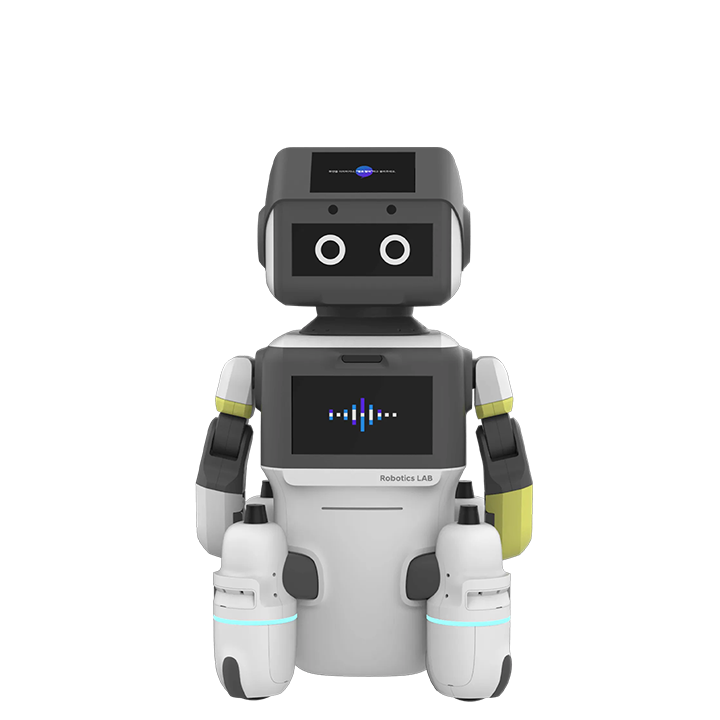
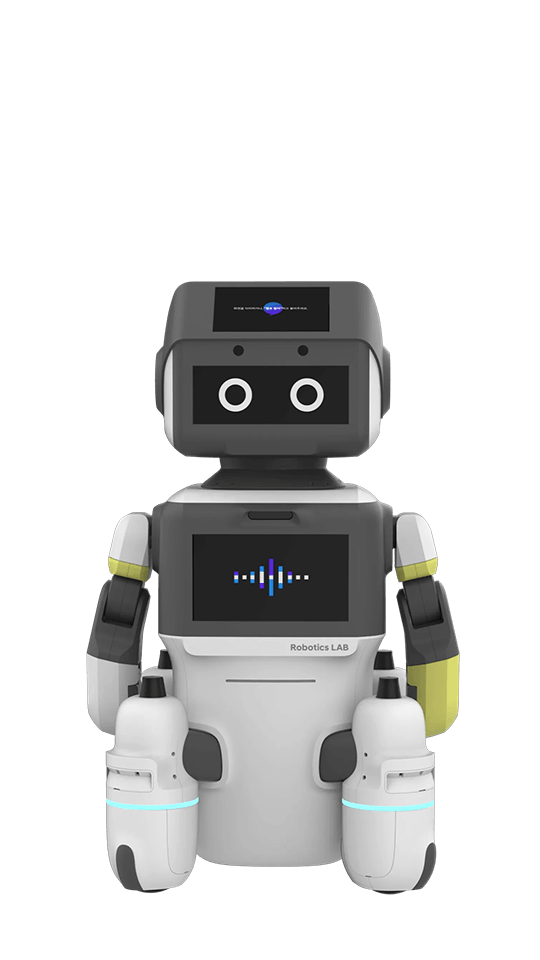
by
Robotics LAB Hyundai Motor Group
A friendly service robot equipped with facial recognition and language processing to assist customers in retail and showroom environments.
by
KAIST Hubo Lab
Albert HUBO (2005) was the world’s first android with a head mounted on a life-size walking robotic frame and the world’s first walking humanoid robot.