Image:
AgiBot
A full-sized, electric-powered bipedal humanoid robot focused on autonomous task execution.

China

Embosar dual XCU+NPU architecture.

Height
165
cm

Weight
60
kg

Speed
N/A
m/s

Payload
5
kg

Actuators
High-dexterity electric actuators

DoF (Domains of freedom)
38
°

Extends vertically to reach shelves nearly 8 feet high.
6-foot 3-inch reach for counter-height manipulation tasks.

Automotive-grade NPU/XCU system for high-reliability AI.
Navigation models trained specifically for retail environments.
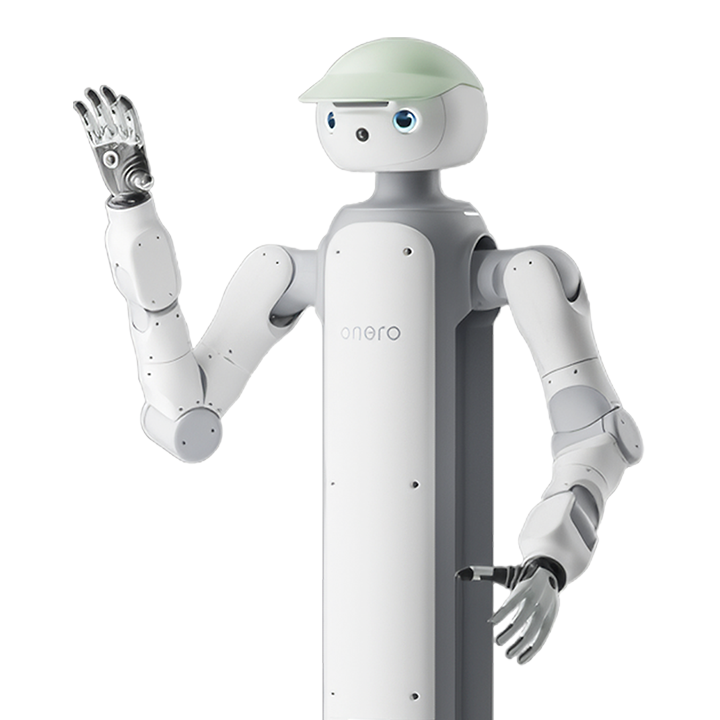
A full-sized, electric-powered bipedal humanoid robot focused on autonomous task execution.
Standing 165 cm and weighing 60 kg, Galbot G1 features 38 degrees of freedom. Powered by the Embosar dual XCU+NPU architecture (275 TOPS) for autonomous retail replenishment and pharmacy picking.
Image:
AgiBot
Top features include an omnidirectional wheeled chassis, 10-hour runtime, and 0-2.4 m height reach. It can perform autonomous shelf replenishment and picking while interacting with customers.
G1 by Galbot
Actuators
High-dexterity electric actuators
DoF (Domains of freedom)
38
°
Height
165
cm
Speed
N/A
m/s
Weight
60
kg
Payload
5
kg
Runtime
N/A
h
OS / AI System
Embosar dual XCU+NPU architecture.
Uses the proprietary Embosar automotive-grade dual architecture (XCU + NPU). Its sensing stack includes a 6.25-inch interactive display and 6-axis wrist force sensors for precise manipulation.
Image:
AgiBot
Major customers include supermarkets and pharmacies. The robot is used for automated shelf replenishment and guiding customers to products in dynamic retail environments.
Introduces an adjustable torso system that allows the robot to extend its reach from standard counter height to nearly 8 feet, an improvement over static-height service bots.
Programmed to understand "social cues" in movement, such as yielding the right-of-way to people in busy retail or hospital hallways.
Features a clean, modern design that emphasizes utility and friendliness, intended to be a welcoming presence in public service roles.
Features hands designed for common human tasks like picking up a bottle or handling a shopping basket, bridging the gap to functional service.




by
A general-purpose, full-size humanoid robot focused on affordability and high-performance locomotion.
by
A full-sized, electric-powered bipedal humanoid robot focused on autonomous task execution.
by
A general-purpose humanoid robot platform designed for scalable industrial applications and AI development.
by
SwitchBot
A multitask household humanoid robot utilizing VLA models for complex chores like laundry and dishwashing in real home environments.