


Image:
Osada/Seguin/DRASSM
A successor to H6, this is a full-body, lightweight humanoid for research in real-world, dynamic interaction.

Linux, ROS / ROS 2

Height
160
cm

Weight
116
kg

Speed
0.55
m/s

Payload
10
kg

Actuators
Electric Servo

DoF (Domains of freedom)
35
°

Leg and hip design carefully mimic human skeletal anatomy.
Arm placement designed to work on standard human-height surfaces.
Advanced framework supporting human-scale step and gait patterns.
A research platform for studying dynamic whole-body interaction.
A successor to H6, this is a full-body, lightweight humanoid for research in real-world, dynamic interaction.
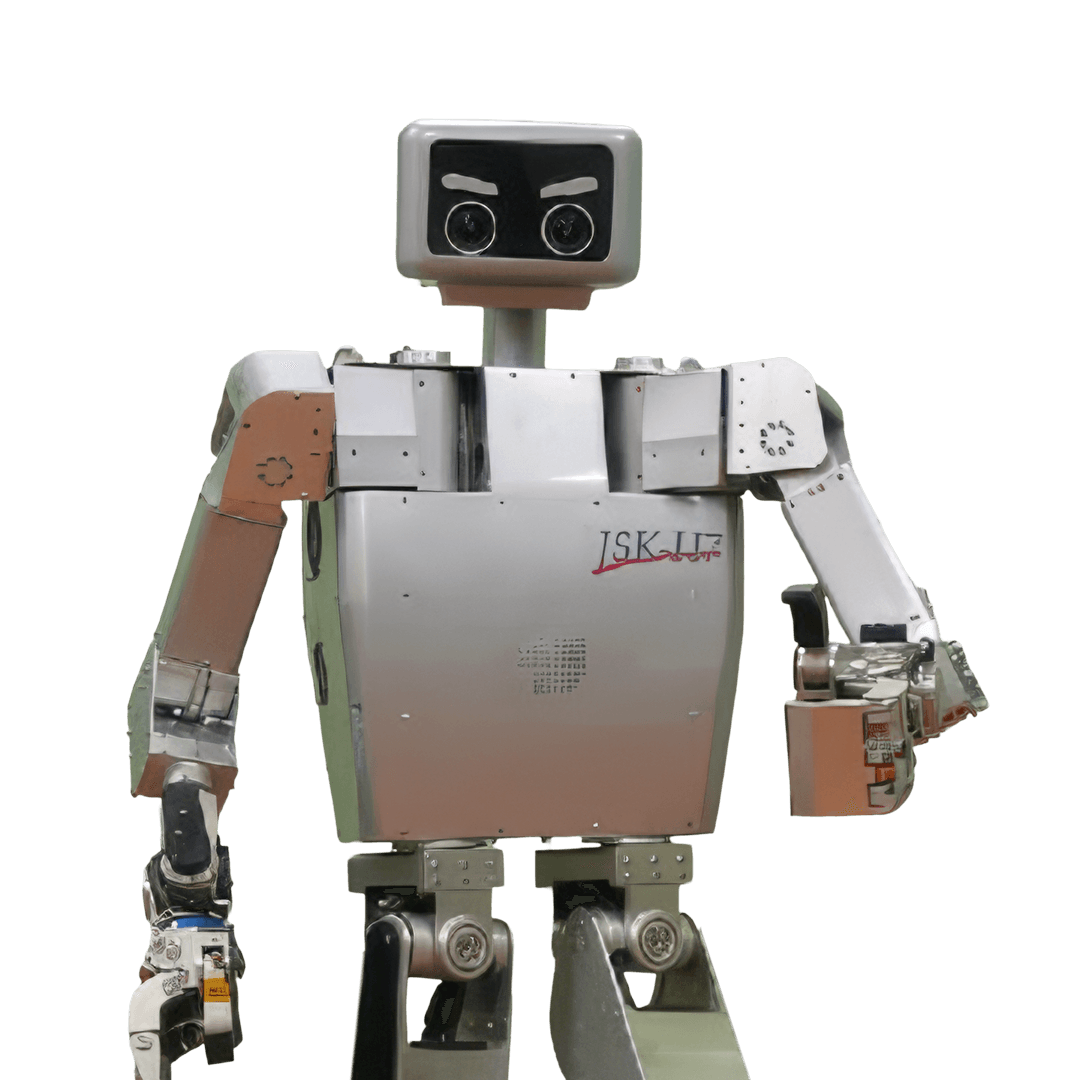
The H7 is a landmark research platform from the JSK Lab, standing 147 cm tall and weighing 57 kg. Running on RT-Linux, it was one of the first humanoids to demonstrate real-time perception-action coupling, integrating head-mounted stereo vision with 6-axis force sensors in the feet. Its historical significance lies in its role as a centralized system for debugging the complex balance and motion algorithms used today.
Image:
Osada/Seguin/DRASSM
A historical benchmark in integrated sensing from JSK Lab, featuring dual-processor architecture and RT-Linux to provide a stable, high-performance platform for the foundational study of bipedal autonomy.
H7 by University of Tokyo
Actuators
Electric Servo
DoF (Domains of freedom)
35
°
Height
160
cm
Speed
0.55
m/s
Weight
116
kg
Payload
10
kg
Runtime
0.5
h
OS / AI System
Linux, ROS / ROS 2
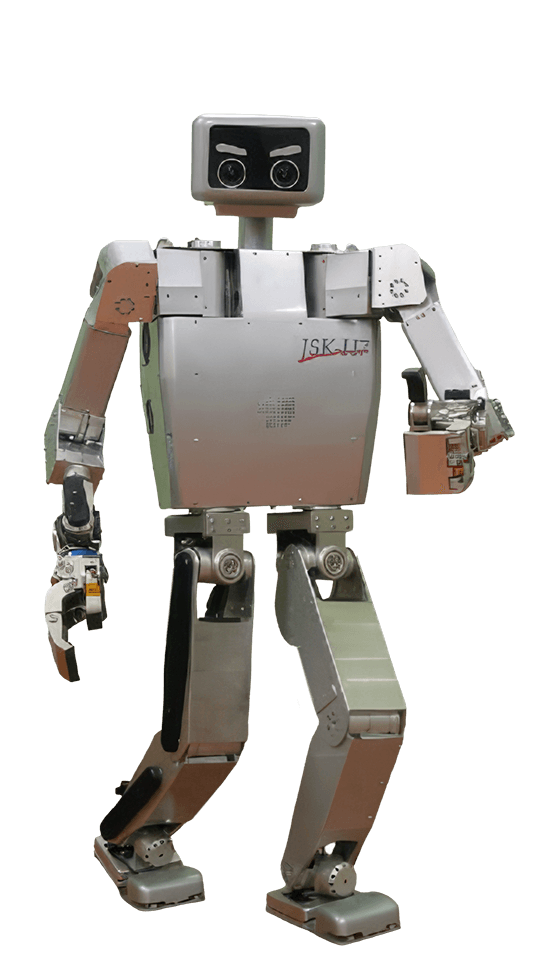
Based on a specialized RT-Linux architecture that enables deterministic control of 30+ degrees of freedom for complex whole-body movements.
Utilizes proprietary algorithms for online generation of walking trajectories and a hand-centric control system for manipulation in confined spaces.
Features a high-performance dual-processor system that synchronizes vision processing and motion planning for fully autonomous indoor behavior.
Image:
Osada/Seguin/DRASSM
Exclusively utilized by JSK Lab and AIST for high-level bipedal research.
Academic institutions and government agencies developing future disaster response protocols.
Building on the H5 and H6 platforms from JSK Lab, the H7 introduces real-time online gait generation and a denser 3D LiDAR suite. This allows for significantly more reliable navigation through cluttered, multi-room laboratory environments compared to the fixed-path predecessors.
Leg and hip design mimic human skeletal geometry.
Arm placement allows work on human-height surfaces.
Supports gait patterns similar to human locomotion.


by
Maxtronics
A small, interactive, and programmable humanoid robot widely used in education, research, and healthcare.
by
Tokyo Robotics
A torque-controlled humanoid robot designed as a research platform for advanced manipulation and HRI.
by
Ti5 Robot
A 1.7m bipedal platform with high torque density joints, capable of dynamic movements like jumping.
by
Tencent Robotics X
Also known as "The Five", a hybrid robot that can switch between walking and wheeled modes for elderly care.












