Image:
Fourier
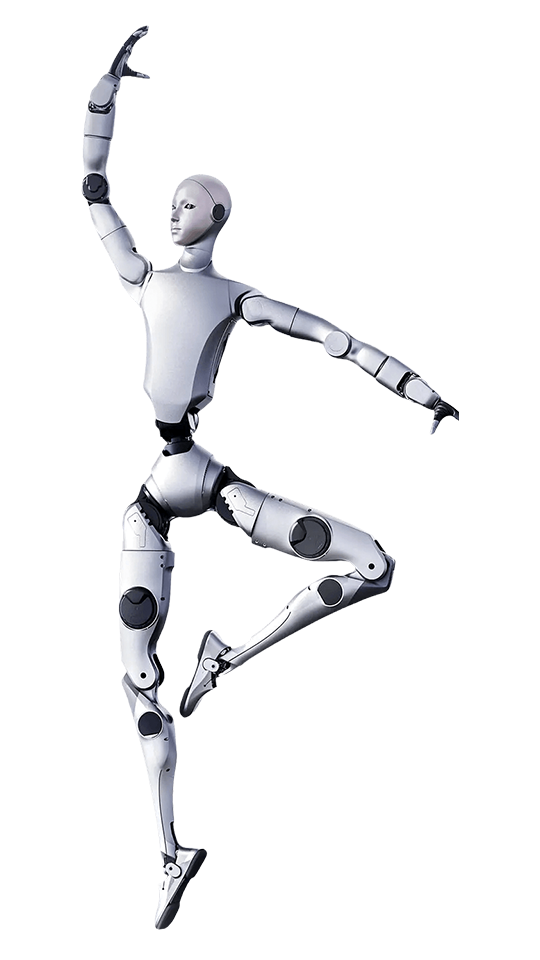
A high-performance humanoid platform for developers, featuring 12-DoF dexterous hands and high-torque actuators for complex manipulation.


Fourier Control / ROS

Height
175
cm

Weight
63
kg

Speed
2.0
m/s

Payload
50
kg

Actuators
Fourier high-torque

DoF (Domains of freedom)
54
°

Human-level dexterity for complex assembly and tools.
High-density joint modules for extreme power output.
Market-leading carrying capacity for industrial lifting.
Fully open-source compatible for advanced AI research.
A high-performance humanoid platform for developers, featuring 12-DoF dexterous hands and high-torque actuators for complex manipulation.
GR-2 stands 175 cm and features 54 degrees of freedom, including 12-DoF dexterous hands with array-type tactile sensors. It is powered by custom FSA actuators capable of 380 Nm peak torque.
Image:
Fourier
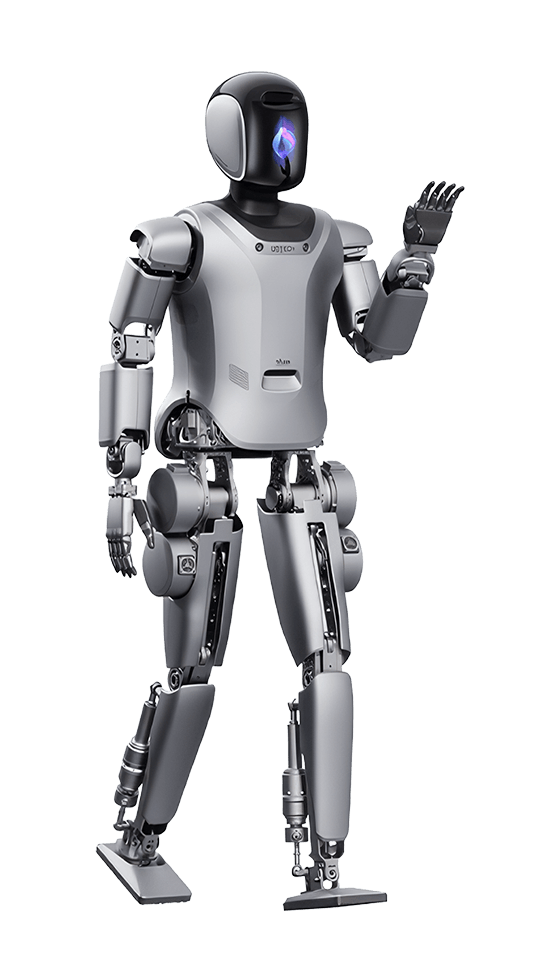
Designed for complex assembly and research, GR-2 provides human-level hand dexterity for tool use. Its modular actuator design ensures high reliability and ease of maintenance in industrial settings.
GR-2 by Fourier Intelligence
Actuators
Fourier high-torque
DoF (Domains of freedom)
54
°
Height
175
cm
Speed
2.0
m/s
Weight
63
kg
Payload
50
kg
Runtime
2
h
OS / AI System
Fourier Control / ROS
Self-developed high-torque density joint modules that integrate motor, driver, and encoder for high-precision motion control and impact resistance.
Image:
Fourier
Fourier's GR-series is widely adopted by global research labs and universities using the Fourier SDK. The GR-2 specifically targets NVIDIA Isaac Lab users and industrial developers focused on complex assembly and tactile manipulation tasks.
GR-2 upgrades the previous GR-1 architecture with 12-DoF dexterous hands and 380 Nm peak torque actuators. It moves from a general research platform to a high-performance industrial manipulator capable of handling 50 kg payloads with human-like precision.
Utilizes sensitive tactile feedback in the hands to handle objects with a delicate, "human-like" touch.
Design follows human skeletal constraints to ensure predictable and natural-looking movement cycles.
Mimics human gait patterns to maintain balance on uneven surfaces or when subjected to external pushes.



by
SwitchBot
A multitask household humanoid robot utilizing VLA models for complex chores like laundry and dishwashing in real home environments.

by
LIMX Dynamics
A bipedal robot focused on high-dynamic mobility and terrain adaptation, designed for R&D and future service applications.

by
Unitree Robotics
A high-performance general-purpose humanoid robot standing 1.8m tall, featuring 360-degree depth perception.

by
UBTECH Robotics
An industrial humanoid robot integrated with Large Language Models, specifically designed for assembly line tasks and manufacturing automation.