Image:
Robotera
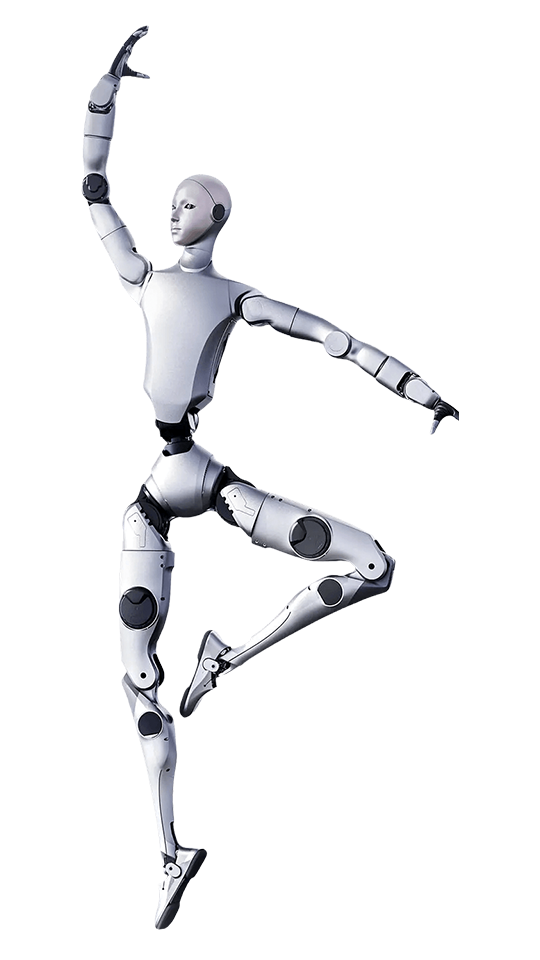
An advanced, full-size bipedal humanoid robot.


Star1 is built for speed, holding a world record for bipedal running at 3.6 m/s through challenging outdoor terrains like deserts.
The integrated ERA-42 AI model allows it to master over 100 precise tasks, from sorting goods to even using chopsticks.
With massive 400 Nm torque joints, it has the explosive strength needed for stable running, jumping, and even complex movements.
Its XHAND 1 features 12 active degrees of freedom, giving it the fine motor skills required for everything from gaming to factory work.
An advanced, full-size bipedal humanoid robot.
Star1 is engineered for record-breaking agility, utilizing high-power-density motors to achieve rapid running speeds. Its design emphasizes dynamic balance, allowing it to navigate rough outdoor terrain and obstacles that stop traditional humanoid robots. With a focus on ruggedness and speed, Star1 is a leading platform for search-and-rescue and high-speed delivery simulations.
Image:
Robotera
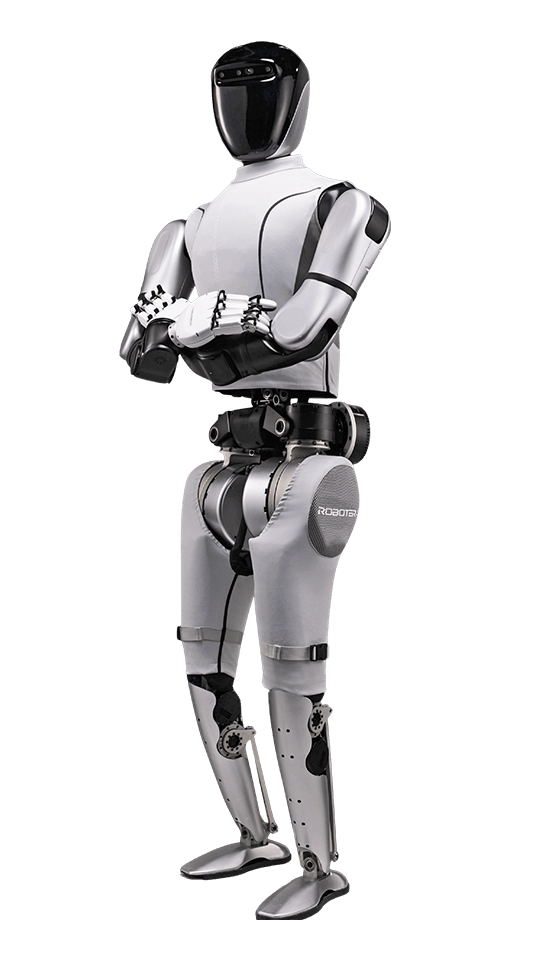
A record-breaking athlete optimized for 3.6 m/s outdoor running, utilizing 55 degrees of freedom and powerful reinforcement learning to conquer unpredictable terrains.
Star1 by Robotera
Actuators
High-Torque Joint
DoF (Domains of freedom)
49+
°
Height
171
cm
Speed
3.6
m/s
Weight
63
kg
Payload
20
kg
Runtime
3.1
h
OS / AI System
ERA-42
Powered by high-torque-density motors optimized for 3.6 m/s bipedal running, controlled by a reinforcement learning model that masters rough outdoor terrains.
Features 55 active degrees of freedom, enabling gymnastic-level flexibility and a "lie-to-stand" recovery system that ensures operational continuity after falls.
Image:
Robotera
Development partnerships with UNIDO and backing from Geely Capital for supply chain integration.
Global electronics manufacturers (3C) and large-scale logistics fulfillment centers.
Building on earlier Robotera prototypes, Star1 focuses on extreme bipedal athleticism. It achieves a top speed of 3.6 m/s through a reinforcement learning-based gait, offering far superior balance on uneven outdoor terrain compared to its predecessors.
Built to move and work like a standing adult human.
Tuned for safe movement near people.
Arm and wrist design allow use of human tools.



by
SwitchBot
A multitask household humanoid robot utilizing VLA models for complex chores like laundry and dishwashing in real home environments.

by
LIMX Dynamics
A bipedal robot focused on high-dynamic mobility and terrain adaptation, designed for R&D and future service applications.

by
Unitree Robotics
A high-performance general-purpose humanoid robot standing 1.8m tall, featuring 360-degree depth perception.

by
UBTECH Robotics
An industrial humanoid robot integrated with Large Language Models, specifically designed for assembly line tasks and manufacturing automation.