Learn what this feature means, why it is essential, and how it is used across different humanoid robots.
Artificial Skin / Tactile Skin
A sensor-covered outer layer that allows a robot to detect touch, pressure, and sometimes temperature. Artificial skin enhances safe human-robot interaction, enables force-sensitive manipulation, and improves awareness during physical contact.
Examples
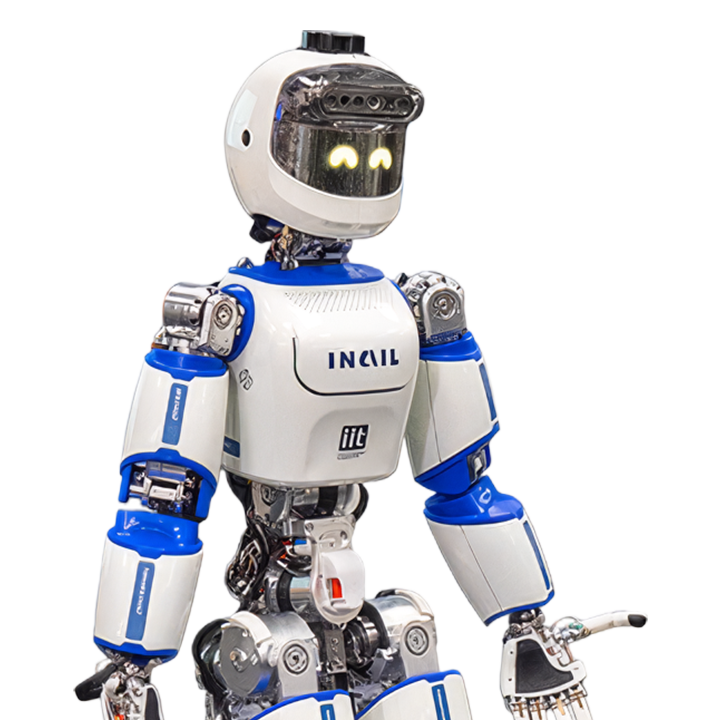
The iCub robot features a full-body tactile skin that allows it to feel the difference between a light touch and a hard push.

by
ergoCub Project
A collaborative humanoid robot research project aimed at reducing physical risk and improving ergonomics for workers in industrial settings.
.svg)
by
Nature
The original bipedal model. Extremely high maintenance, notoriously unreliable, and ships with buggy firmware. (f. ~300,000 BCE)

by
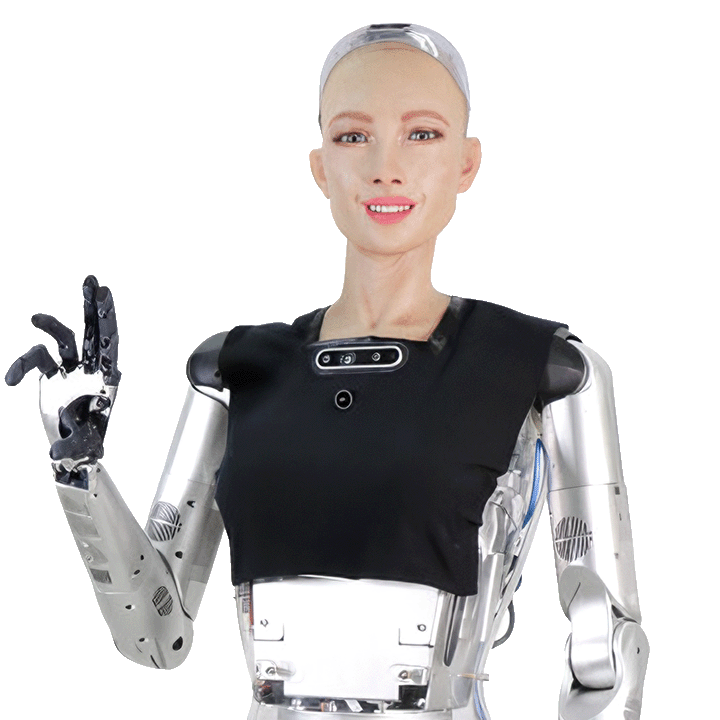
Hanson Robotics
Sophia is a well-known social humanoid robot and AI platform, famous for its human-like appearance and conversational abilities. Sophia 2020 robotics platform is available for research, academic, and B2B applications.