Learn what this feature means, why it is essential, and how it is used across different humanoid robots.
Wheeled Locomotion
A mobility system where the robot moves using wheels instead of legs. Wheeled locomotion offers higher energy efficiency, stability, and speed on flat surfaces, making it suitable for logistics, service, and indoor industrial environments.
Examples
Boston Dynamics' Handle and Fraunhofer's Care-O-bot use wheels for efficient movement on flat surfaces while retaining upper-body manipulation.


by
andromeda
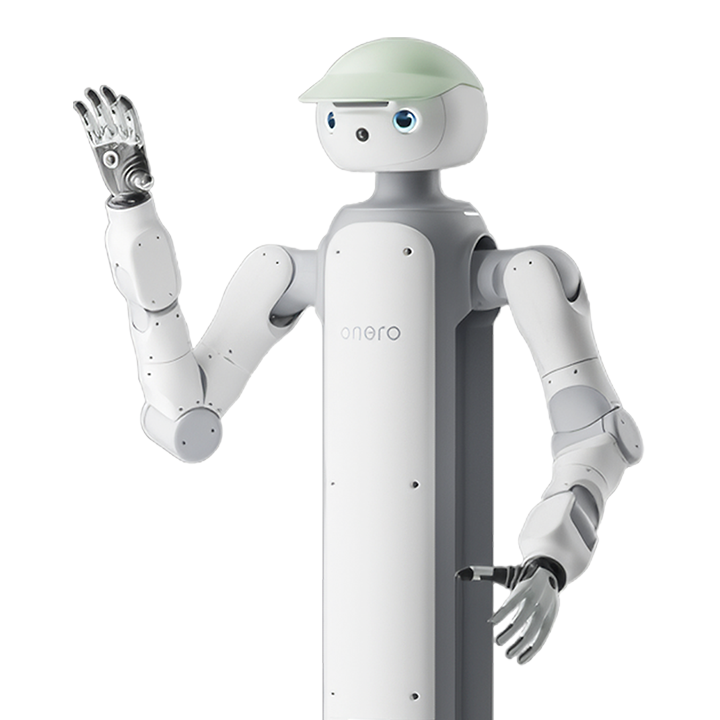
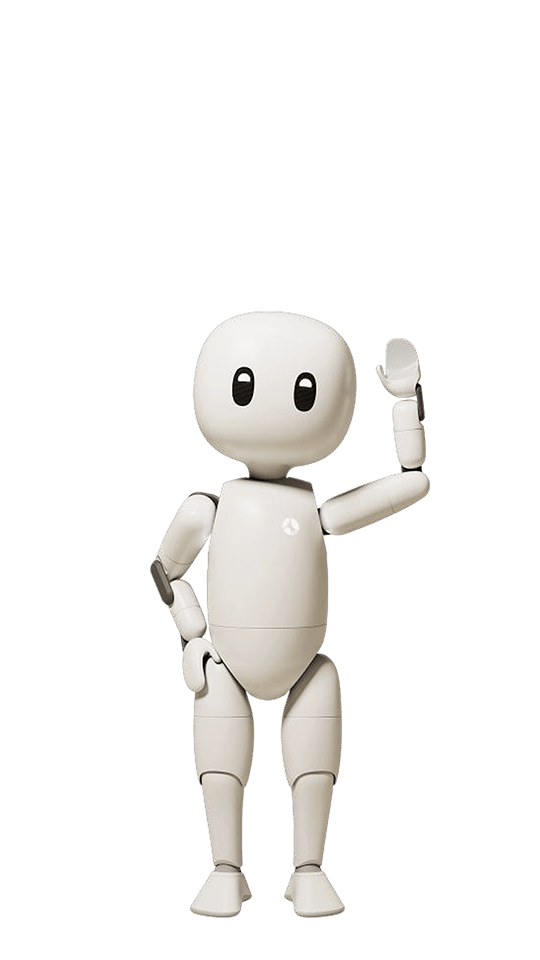
A social humanoid robot designed as a companion for aged care and assisted living, capable of speaking over 90 languages to improve resident wellbeing.

by
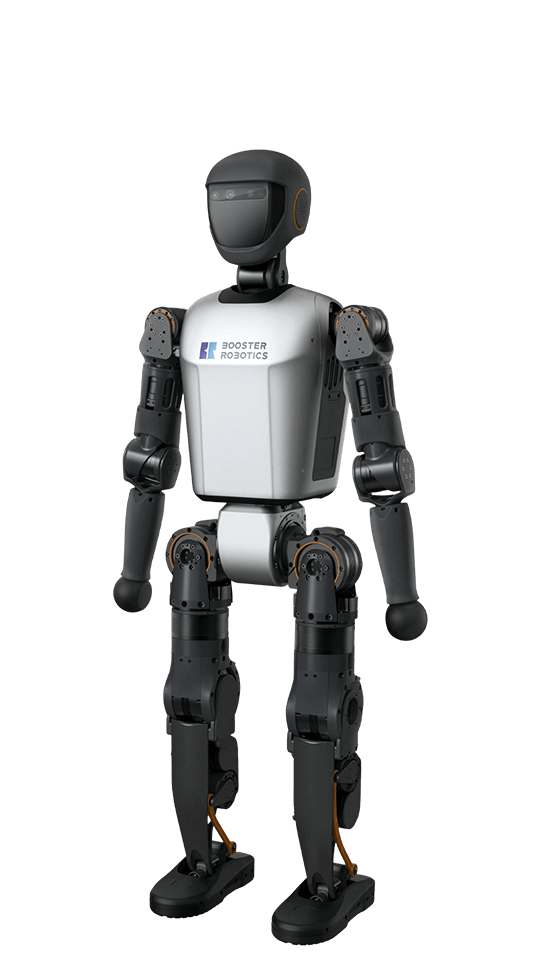
Booster Robotics
The Booster T1 is a lightweight, high-performance, open-source humanoid robot designed for developers and researchers, featuring ROS2 compatibility, advanced simulation, and AI capabilities.
by
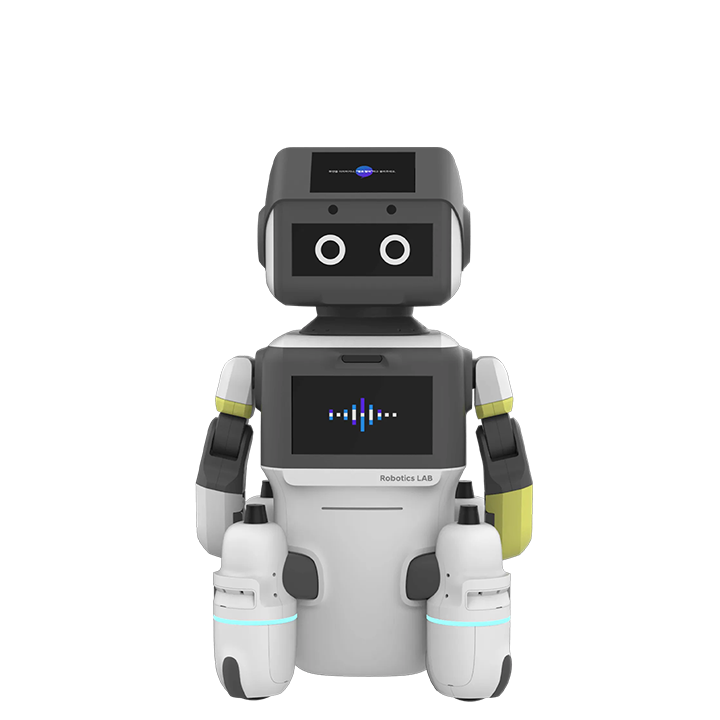
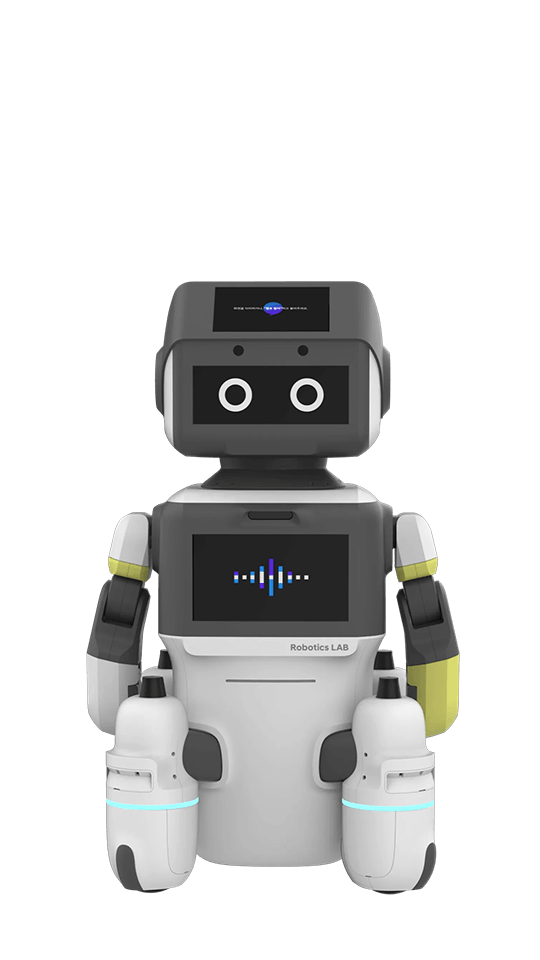
Robotics LAB Hyundai Motor Group
A friendly service robot equipped with facial recognition and language processing to assist customers in retail and showroom environments.

by
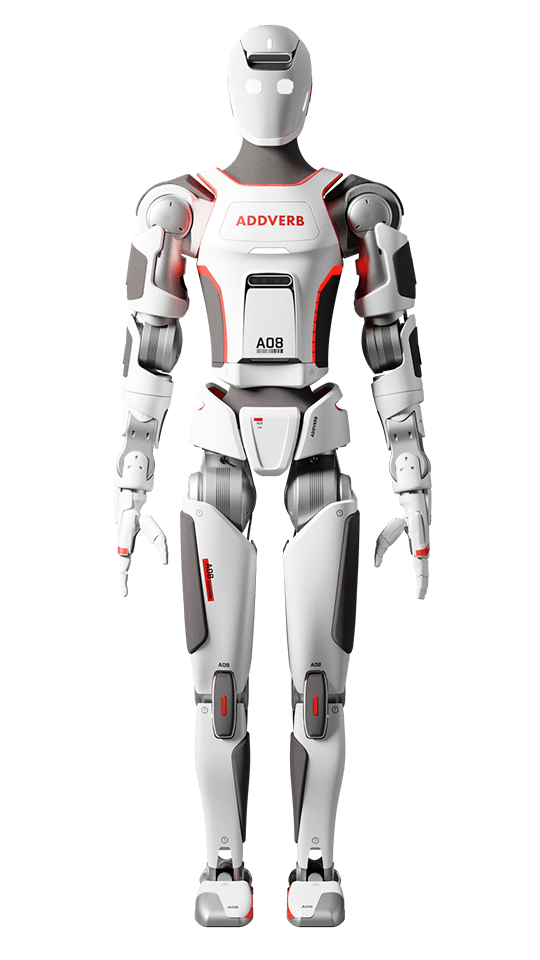
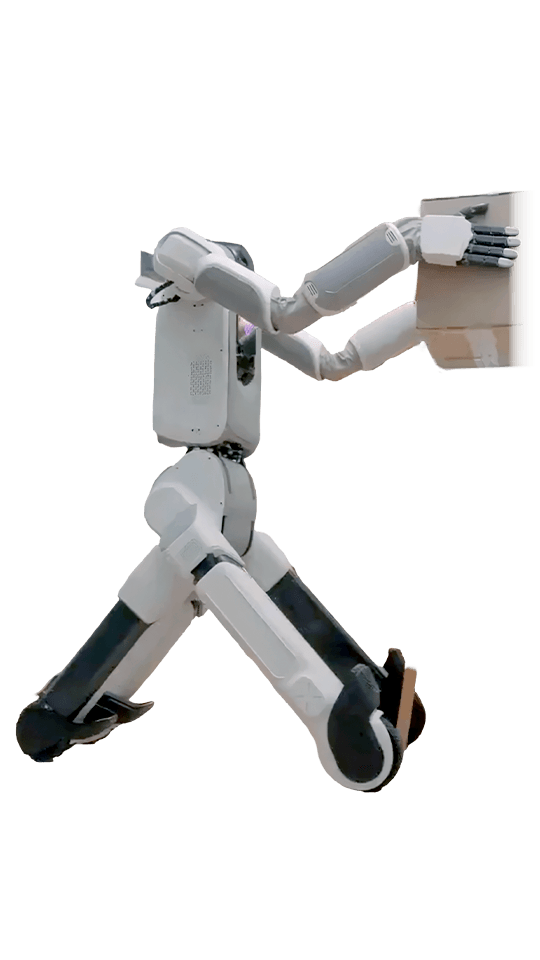
Addverb
A general-purpose bipedal humanoid with 41 DoF and VLA-enabled AI, designed for industrial and logistics applications.
by
SwitchBot
A multitask household humanoid robot utilizing VLA models for complex chores like laundry and dishwashing in real home environments.

by
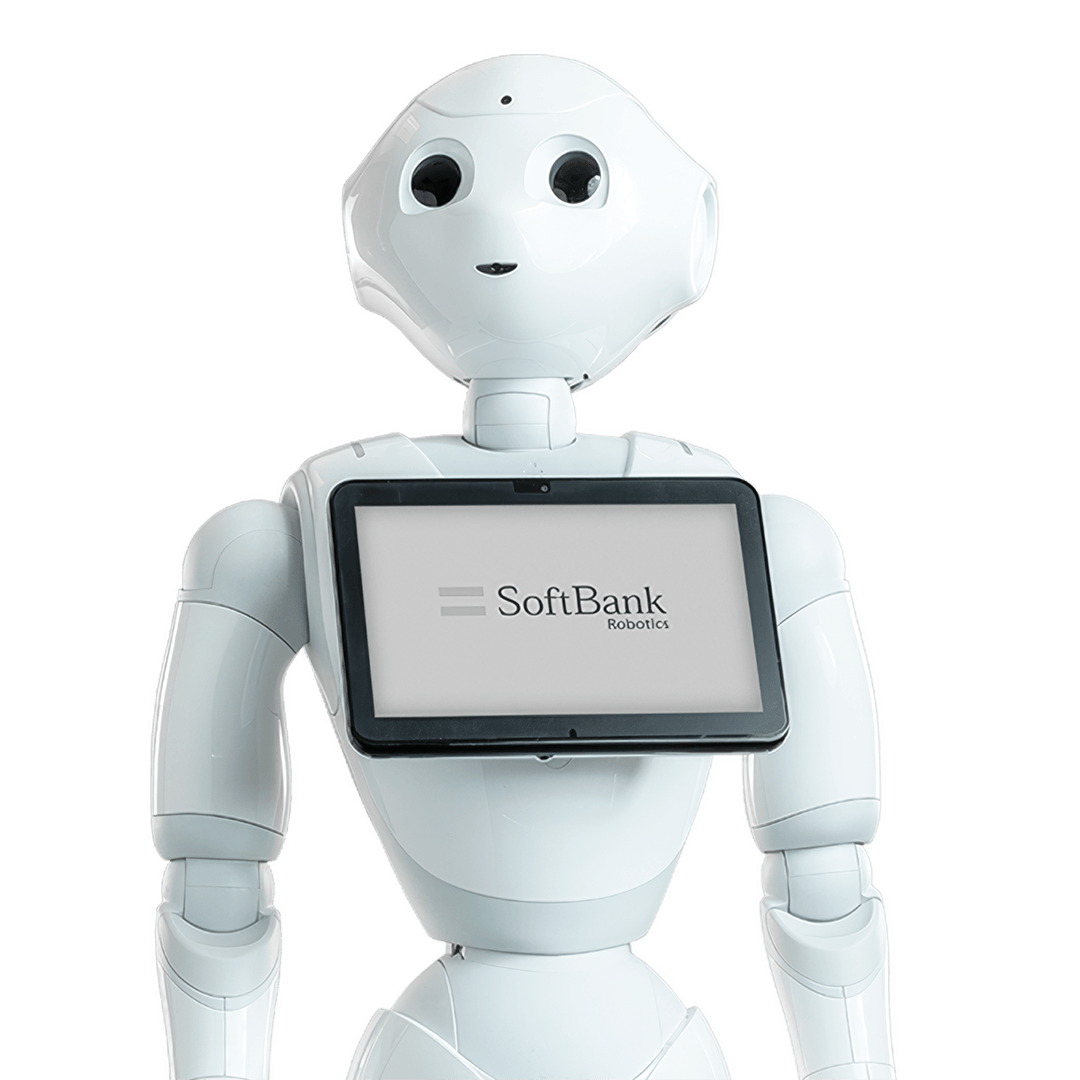
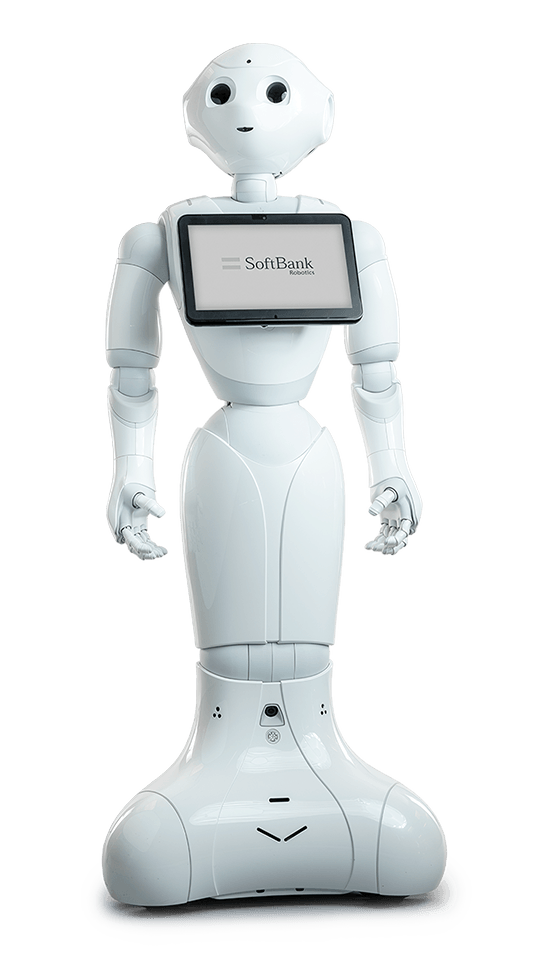
Softbank Robotics
A human-sized, wheeled robot designed for social interaction, widely used in retail and hospitality.
by
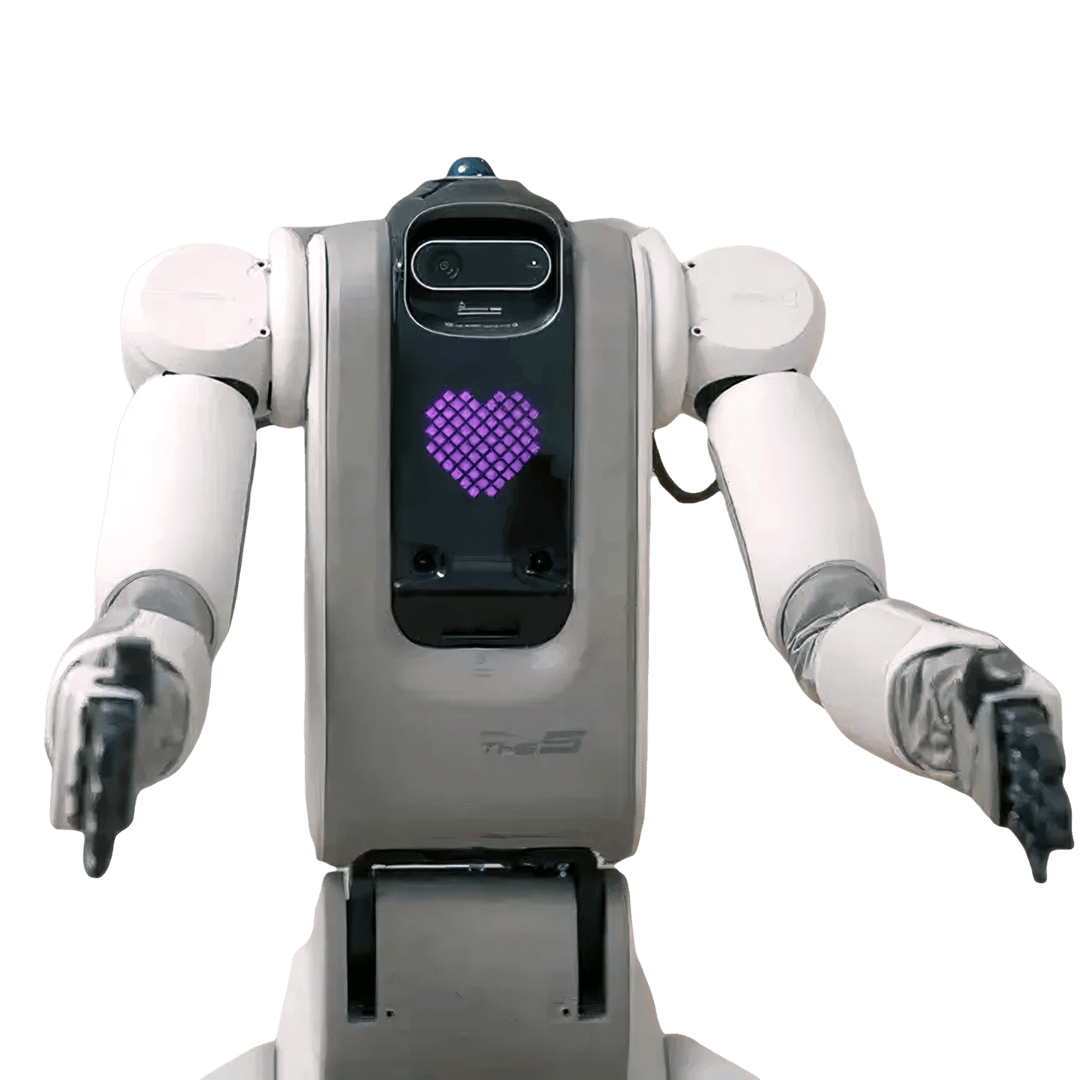
Tencent Robotics X
Also known as "The Five", a hybrid robot that can switch between walking and wheeled modes for elderly care.

by
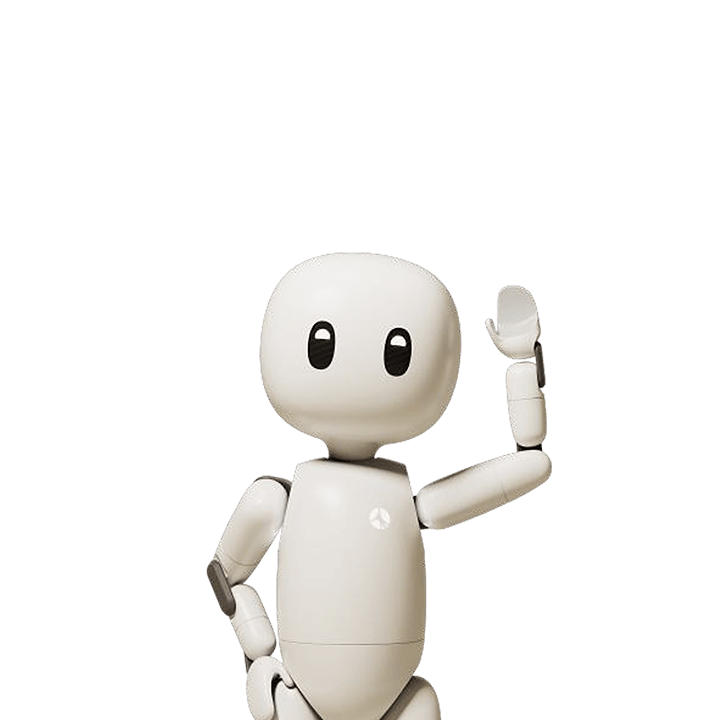
Cartwheel
A social humanoid robot designed for companionship and hospitality interaction, with expressive movement capabilities.